ZA podstawa ortonormalna Tworzą go wektory prostopadłe do siebie, których moduł również wynosi 1 (wektory jednostkowe). Pamiętajmy, że baza b w przestrzeni wektorowej V, definiuje się jako zbiór liniowo niezależnych wektorów zdolnych do generowania wspomnianej przestrzeni.
Z kolei przestrzeń wektorowa jest abstrakcyjnym bytem matematycznym, wśród którego elementami są wektory, zwykle związane z wielkościami fizycznymi, takimi jak prędkość, siła i przemieszczenie, lub też z macierzami, wielomianami i funkcjami..

Wektory mają trzy charakterystyczne elementy: wielkość lub moduł, kierunek i zwrot. Baza ortonormalna jest szczególnie przydatna do reprezentowania ich i operowania nimi, ponieważ każdy wektor należący do określonej przestrzeni wektorowej V, można zapisać jako liniową kombinację wektorów tworzących bazę ortonormalną.
W ten sposób operacje między wektorami są wykonywane analitycznie, takie jak dodawanie, odejmowanie i różne typy iloczynów zdefiniowane w tej przestrzeni..
Jedną z najczęściej używanych podstaw w fizyce jest baza utworzona przez wektory jednostkowe ja, jot Y k Reprezentują trzy charakterystyczne kierunki przestrzeni trójwymiarowej: wysokość, szerokość i głębokość. Te wektory są również znane jako kanoniczne wektory jednostkowe.
Gdyby zamiast tego wektory pracowały na płaszczyźnie, wystarczyłyby dwa z tych trzech składników, podczas gdy w przypadku wektorów jednowymiarowych wystarczy jeden.
Indeks artykułów
1- Baza b to najmniejszy możliwy zbiór wektorów generujących przestrzeń wektorową V.
2- Elementy b są liniowo niezależne.
3- Dowolna podstawa b przestrzeni wektorowej V, pozwala wyrazić wszystkie wektory V jako ich liniowe połączenie, a ten kształt jest unikalny dla każdego wektora. Dlatego do b jest również znany jako system generatora.
4- Ta sama przestrzeń wektorowa V może mieć różne podstawy.
Oto kilka przykładów baz ortonormalnych i ogólnie baz:
Nazywany również naturalną bazą lub standardową podstawą ℜ n, gdzie ℜ n to przestrzeń n-wymiarowy, na przykład trójwymiarowa przestrzeń to ℜ 3. Do wartości n To się nazywa wymiar przestrzeni wektorowej i jest oznaczony jako słaby (V).
Wszystkie wektory należące do ℜ n są reprezentowane przez n-adas zamówione. Przestrzeń ℜn, podstawą kanoniczną jest:
i1 = <1,0,… ,0>; idwa = <0,1,… ,0>; ... in = <0,0,… ,1>
W tym przykładzie użyliśmy notacji z nawiasami lub „nawiasami” i pogrubieniem dla wektorów jednostkowych i1, idwa, i3...
Znane wektory ja, jot Y k przyznaję tę samą reprezentację i wszystkie trzy z nich wystarczą do reprezentowania wektorów w ℜ 3:
ja = <1,0,0 >; jot = <0,1,0 >; k = <0,0,1 >
Oznacza to, że podstawę można wyrazić w ten sposób:
B = <1,0,0 >; <0,1,0 >; <0,0,1 >
Aby sprawdzić, czy są one liniowo niezależne, utworzona z nimi determinanta jest niezerowa i równa 1:
fa = <4,-7,0 > N = 4ja -7jot + 0k N.
W związku z tym ja, jot Y k tworzą układ generatora ℜ 3.
Standardowa baza opisana w poprzedniej sekcji nie jest jedyną bazą ortonormalną w ℜ3. Tutaj mamy na przykład podstawy:
b1 =
bdwa = <3/5, 4/5,0 >; <- 4/5, 3/5,0 >; <0,0,1 >
Można wykazać, że te bazy są ortonormalne, dlatego pamiętamy o warunkach, które muszą być spełnione:
-Wektory tworzące podstawę muszą być względem siebie prostopadłe.
-Każdy z nich musi być jednolity.
Możemy to zweryfikować wiedząc, że utworzona przez nie determinanta musi być różna od zera i równa 1.
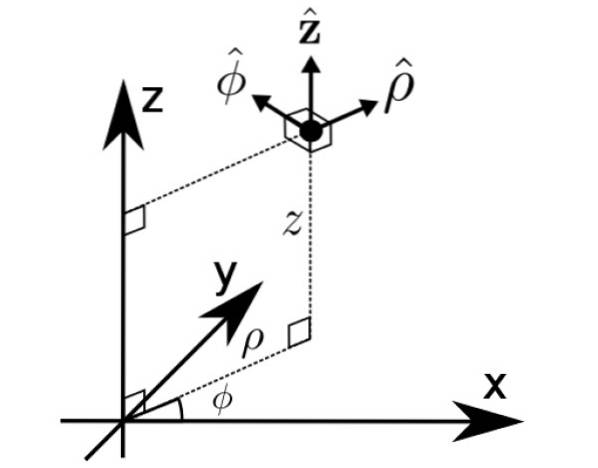
Podstawa B1 chodzi właśnie o współrzędne cylindryczne ρ, φ i z, inny sposób wyrażania wektorów w przestrzeni.
Pokaż, że podstawa B = <3/5, 4/5,0 >; <- 4/5, 3/5,0 >; <0,0,1 > jest ortonormalny.
Aby pokazać, że wektory są do siebie prostopadłe, użyjemy iloczynu skalarnego, zwanego również iloczynem wewnętrznym lub skalarnym dwóch wektorów.
Niech będą dowolnymi dwoma wektorami lub Y v, jego iloczyn skalarny jest definiowany przez:
lub • v = u.v. cosθ
Aby rozróżnić wektory ich modułów, użyjemy pogrubienia dla pierwszych i normalnych liter dla drugich. θ jest kątem pomiędzy lub Y v, dlatego jeśli są prostopadłe, oznacza to, że θ = 90º, a iloczyn skalarny wynosi zero.
Alternatywnie, jeśli wektory są podane w kategoriach ich składników: lub =
lub • v = lubx .vx + lubY .vY + lubz .vz
W ten sposób iloczyn skalarny między każdą parą wektorów to odpowiednio:
ja) <3/5, 4/5,0 > • <- 4/5, 3/5,0 > = (3/5). (- 4/5) + (4/5). ((3/5) + 0,0 = (-12/25) + (12/25) = 0
ii) <3/5, 4/5,0 > • <0, 0,1 > = 0
iii) <- 4/5, 3/5,0 > • <0, 0,1 > = 0
Dla drugiego warunku obliczany jest moduł każdego wektora, który otrzymuje się ze wzoru:
│u │ = √ (uxdwa + lubYdwa + lubzdwa)
Zatem moduły każdego wektora to:
│<3/5, 4/5,0 >│ = √ [(3/5)dwa + (4/5)dwa + 0dwa)] = √ [(9/25) + (16/25)] = √ (25/25) = 1
│<-4/5, 3/5,0 >│ = √ [(-4/5)dwa + (3/5)dwa + 0dwa)] = √ [(16/25) + (9/25)] = √ (25/25) = 1
│<0, 0,1 >│ = √ [0dwa + 0dwa + 1dwa)] = 1
Dlatego wszystkie trzy są wektorami jednostkowymi. Wreszcie wyznacznik, który tworzą, jest niezerowy i równy 1:

Napisz współrzędne wektora w = <2, 3,1 > pod względem starej bazy.
Aby to zrobić, stosuje się następujące twierdzenie:
Niech B = v1, vdwa, v3,... vn baza ortonormalna w przestrzeni V z iloczynem wewnętrznym, wektorem w jest reprezentowany przez B w następujący sposób:
w = <w•v1> v1 + <w•vdwa> vdwa +<w•v3> v3 +... <w•vn> vn
Oznacza to, że możemy zapisać wektor w bazie B, używając współczynników <w•v1>, <w•vdwa>, ... <w•vn>, dla których należy obliczyć wskazane iloczyny skalarne:
<2, 3,1 > • <3/5, 4/5,0 > = (2). (3/5) + (3). (4/5) + 1,0 = (6/5) + (12/5) = 18/5
<2, 3,1 > • <- 4/5, 3/5,0 > = (2). (- 4/5) + (3). (3/5) + 1,0 = (-8/5) + (9/5) = 1/5
<2, 3,1 > • <0,0,1> = 1
Z otrzymanych iloczynów skalarnych budowana jest macierz tzw macierz współrzędnych z w.
Dlatego współrzędne wektora w w podstawie B są wyrażone przez:
[w]b= [(5/18); (1/5); 1]
Macierz współrzędnych nie jest wektorem, ponieważ jest wektorem Nie jest taki sam jak jego współrzędne. To tylko zbiór liczb, które służą do wyrażenia wektora w danej bazie, a nie wektor jako taki. Zależą również od wybranej bazy.
Wreszcie, zgodnie z twierdzeniem, wektor w zostałby wyrażony w ten sposób:
w = (18/5) v1 + (1/5) vdwa + v3
Z: v1 = <3/5, 4/5,0 >; vdwa = <- 4/5, 3/5,0 >; v3 = <0,0,1 >, czyli wektory bazy b.


Jeszcze bez komentarzy