Plik kąt zerowy Jest to taki, którego miarą jest 0, zarówno w stopniach, jak i w radianach lub w innym systemie pomiaru kąta. Dlatego brakuje mu szerokości lub otwarcia, takiego jak ten utworzony między dwiema równoległymi liniami..
Chociaż jego definicja brzmi dość prosto, kąt zerowy jest bardzo przydatny w wielu zastosowaniach fizycznych i inżynieryjnych, a także w nawigacji i projektowaniu..

Istnieją wielkości fizyczne, które muszą być wyrównane równolegle, aby osiągnąć określone efekty: jeśli samochód porusza się po linii prostej na autostradzie i wprowadź jego wektor prędkości v i jego wektor przyspieszenia do jest 0º, samochód porusza się coraz szybciej, ale jeśli samochód hamuje, jego przyspieszenie jest przeciwne do prędkości (patrz rysunek 1).
Poniższy rysunek przedstawia różne typy kątów, w tym kąt zerowy w prawo. Jak widać, kąt 0 ° nie ma szerokości ani otwarcia..

Indeks artykułów
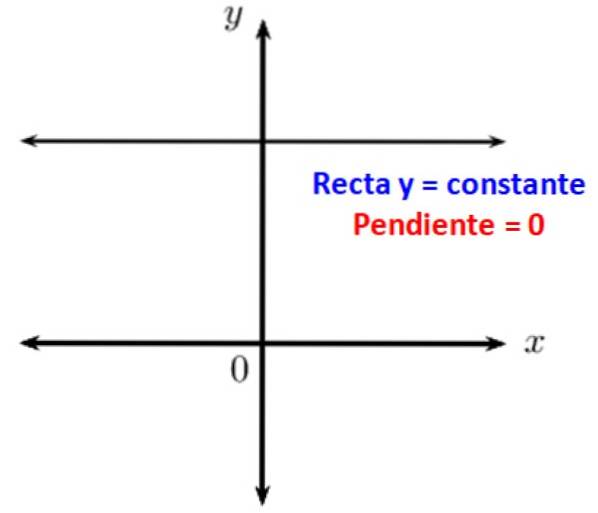
Wiadomo, że równoległe linie tworzą ze sobą kąt zerowy. Gdy masz linię poziomą, jest ona równoległa do osi x układu współrzędnych kartezjańskich, dlatego jej nachylenie względem niej wynosi 0. Innymi słowy, linie poziome mają zerowe nachylenie.
Również stosunki trygonometryczne kąta zerowego wynoszą 0, 1 lub nieskończoność. Dlatego kąt zerowy występuje w wielu sytuacjach fizycznych, które obejmują operacje na wektorach. Oto powody:
-sin 0º = 0
-cos 0º = 1
-tg 0º = 0
-s 0º = 1
-cosec 0º → ∞
-ctg 0º → ∞
Przydadzą się przy analizie niektórych przykładów sytuacji, w których obecność kąta zerowego odgrywa fundamentalną rolę:
Gdy dwa wektory są równoległe, kąt między nimi wynosi zero, jak pokazano na rysunku 4a powyżej. W tym przypadku sumę obu oblicza się, umieszczając jedną po drugiej, a wielkość wektora sumy jest sumą wielkości addendów (rysunek 4b).

Gdy dwa wektory są równoległe, kąt między nimi wynosi zero, jak pokazano na rysunku 4a powyżej. W tym przypadku sumę obu oblicza się, umieszczając jedną po drugiej, a wielkość wektora sumy jest sumą wielkości addendów (rysunek 4b)
Moment obrotowy lub moment obrotowy powoduje obrót ciała. Zależy to od wielkości przyłożonej siły i sposobu jej przyłożenia. Bardzo reprezentatywnym przykładem jest klucz na rysunku.
Aby uzyskać najlepszy efekt obracania, siłę przykłada się prostopadle do rękojeści klucza, w górę lub w dół, ale nie oczekuje się obrotu, jeśli siła jest równoległa do rękojeści..
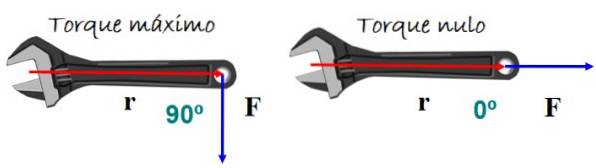
Matematycznie moment obrotowy τ definiuje się jako iloczyn poprzeczny lub produkt krzyżowy między wektorami r (wektor pozycji) i fa (wektor siły) z rysunku 5:
τ = r x fa
Wielkość momentu obrotowego wynosi:
τ = r F sin θ
Gdzie θ jest kątem między r Y fa. Kiedy sin θ = 0 moment obrotowy wynosi zero, w tym przypadku θ = 0º (lub również 180º).
Strumień pola elektrycznego jest wielkością skalarną, która zależy od natężenia pola elektrycznego oraz orientacji powierzchni, przez którą przechodzi..
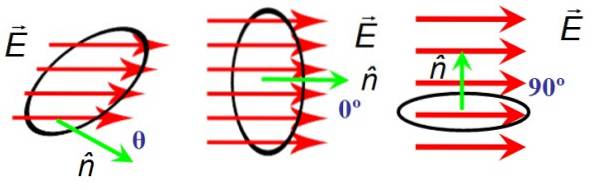
Na rysunku 6 znajduje się okrągła powierzchnia obszaru A, przez którą przechodzą linie pola elektrycznego I. Orientację powierzchni określa wektor normalny n. Po lewej stronie pole i wektor normalny tworzą dowolny kąt ostry θ, w środku tworzą ze sobą kąt zerowy, a po prawej są prostopadłe.
Gdy I Y n są prostopadłe, linie pola nie przecinają powierzchni i dlatego strumień wynosi zero, podczas gdy kąt między I Y n jest zerowe, linie w całości przechodzą przez powierzchnię.
Oznaczając strumień pola elektrycznego grecką literą Φ (czytaj „fi”), jego definicja jednolitego pola, jak na rysunku, wygląda następująco:
Φ = I•nDO
Punkt pośrodku obu wektorów oznacza iloczyn skalarny lub iloczyn skalarny, który jest alternatywnie definiowany następująco:
Φ = I•nA = EAcosθ
Pogrubienie i strzałki nad literą to zasoby umożliwiające rozróżnienie wektora od jego wielkości, co jest oznaczone zwykłymi literami. Ponieważ cos 0 = 1, strumień jest maksymalny, gdy I Y n są równoległe.
Dwie siły P. Y Q działają jednocześnie na punkt obiektu X, obie siły początkowo tworzą między nimi kąt θ. Co dzieje się z wielkością siły wypadkowej, gdy θ spada do zera?
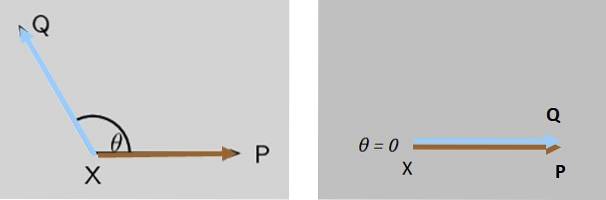
Wielkość siły wypadkowej Q + P. stopniowo rośnie, aż osiągnie maksimum, kiedy Q Y P. są całkowicie równoległe (rysunek 7 po prawej).
Wskaż, czy kąt zerowy jest rozwiązaniem następującego równania trygonometrycznego:
cos 2x = 1 + 4 sin x
Równanie trygonometryczne to takie, w którym niewiadoma jest częścią argumentu stosunku trygonometrycznego. Aby rozwiązać proponowane równanie, wygodnie jest użyć wzoru na cosinus kąta podwójnego:
cos 2x = cosdwa x - grzechdwa x
Ponieważ w ten sposób argument po lewej stronie staje się x zamiast 2x. Następnie:
sałatadwa x - grzechdwa x = 1 + 4sin x
Z drugiej strony cosdwa x + sindwa x = 1, więc:
sałatadwa x - grzechdwa x = cosdwa x + sindwa x + 4sen x
Termin cosdwa x zostaje anulowane i pozostaje:
- sendwa x = grzechdwa x + 4sen x → - 2sendwa x - 4senx = 0 → 2sendwa x + 4senx = 0
Teraz następuje zmiana zmiennej: sinx = u i równanie wygląda następująco:
2udwa + 4u = 0
2u (u + 4) = 0
Czyje rozwiązania to: u = 0 iu = -4. Zwracając zmianę mielibyśmy dwie możliwości: sin x = 0 i sinx = -4. To ostatnie rozwiązanie nie jest wykonalne, ponieważ sinus dowolnego kąta zawiera się w przedziale od -1 do 1, więc pozostaje nam pierwsza alternatywa:
sin x = 0
Dlatego rozwiązaniem jest x = 0º, ale działa również każdy kąt, którego sinus równy jest 0, który może również wynosić 180º (π radianów), 360º (2 π radianów), a także odpowiednie negatywy.
Najbardziej ogólnym rozwiązaniem równania trygonometrycznego jest: x = kπ, gdzie k = 0, ± 1, ± 2, ± 3,…. k liczba całkowita.



Jeszcze bez komentarzy