Plik współrzędne walcowe służą do lokalizacji punktów w przestrzeni trójwymiarowej i składają się ze współrzędnej promieniowej ρ, współrzędnej azymutalnej φ i współrzędnej wysokości z.
Punkt P. umieszczony w przestrzeni jest rzutowany prostopadle na płaszczyznę XY co prowadzi do sedna P ' w tym samolocie. Odległość od początku do punktu P ' określa współrzędną ρ, podczas gdy kąt utworzony przez oś X z promieniem OP ' określa współrzędną φ. Wreszcie współrzędna z jest rzutem ortogonalnym punktu P. na osi Z. (patrz rysunek 1).
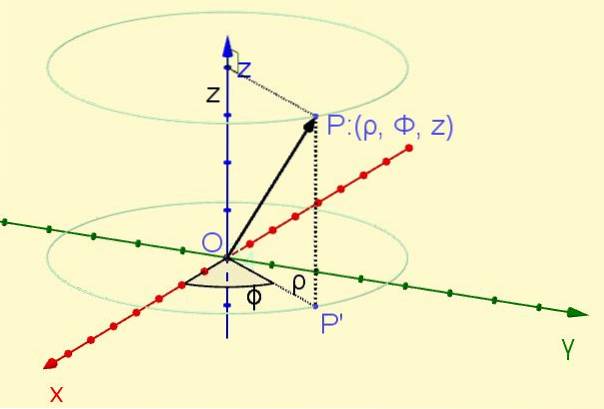
Współrzędna promieniowa ρ jest zawsze dodatnia, współrzędna azymutalna φ zmienia się od zera radianów do dwóch radianów pi, podczas gdy współrzędna z może przyjmować dowolną wartość rzeczywistą:
0 ≤ ρ < ∞
0 ≤ φ < 2π
- ∞ < z < + ∞
Indeks artykułów
Relatywnie łatwo jest uzyskać współrzędne kartezjańskie (x, y, z) punktu P z jego współrzędnych walcowych (ρ, φ, z):
x = ρ cos (φ)
y = ρ sin (φ)
z = z
Ale możliwe jest również uzyskanie współrzędnych biegunowych (ρ, φ, z) wychodząc ze znajomości współrzędnych kartezjańskich (x, y, z) punktu P:
ρ = √ (xdwa + Ydwa)
φ = arctan (y / x)
z = z
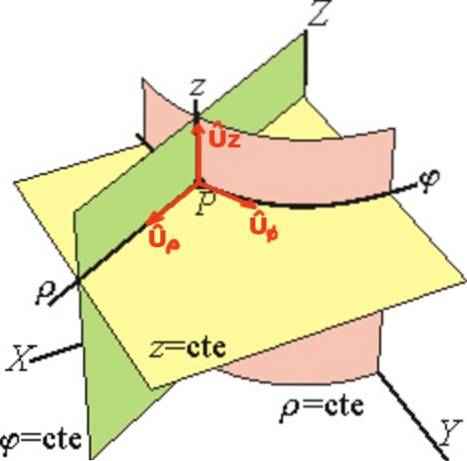
Zdefiniowano podstawę cylindrycznych wektorów jednostkowych Uρ, Uφ, Uz.
Wektor Uρ jest styczna do linii φ = ctte iz = ctte (skierowana promieniowo na zewnątrz), wektor Uφ jest styczna do linii ρ = ctte iz = ctte i na końcu Uz ma ten sam kierunek osi Z..
W cylindrycznej podstawie jednostki wektor położenia r punktu P jest zapisywany wektorowo w następujący sposób:
r = ρ Uρ + 0 Uφ + z Uz
Z drugiej strony nieskończenie małe przemieszczenie dr z punktu P jest on wyrażony w następujący sposób:
rer = dρ Uρ + ρ dφ Uφ + dz Uz
Podobnie nieskończenie mały element objętości dV we współrzędnych cylindrycznych to:
dV = ρ dρ dφ dz
Istnieją niezliczone przykłady użycia i zastosowania współrzędnych cylindrycznych. Na przykład w kartografii występ cylindryczny, właśnie na podstawie tych współrzędnych. Przykładów jest więcej:
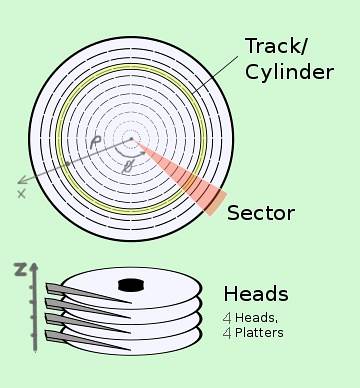
Współrzędne walcowe mają zastosowanie w technologii. Jako przykład mamy system CHS (Cylinder-Head-Sector) do lokalizacji danych na dysku twardym, który w rzeczywistości składa się z kilku dysków:
- Cylinder lub ścieżka odpowiada współrzędnej ρ.
- Sektor odpowiada pozycji φ dysku, który obraca się wysoko prędkość kątowa.
- Głowica odpowiada pozycji Z głowicy odczytującej na odpowiednim dysku.
Każdy bajt informacji ma dokładny adres we współrzędnych cylindrycznych (C, S, H).
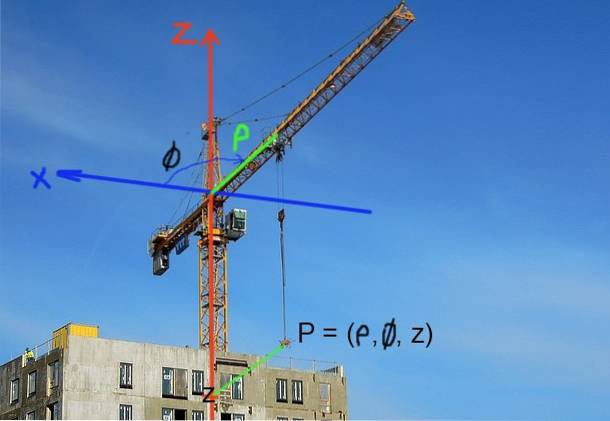
Żurawie budowlane ustalają położenie ładunku we współrzędnych cylindrycznych. Pozycję poziomą określa odległość od osi lub strzałki żurawia ρ oraz jego położenie kątowe φ w stosunku do pewnej osi odniesienia. Pionowe położenie obciążenia określa współrzędna z wysokości.
Istnieją punkty P1 o współrzędnych cylindrycznych (3, 120º, -4) i punkt P2 o współrzędnych walcowych (2, 90º, 5). Znaleźć Odległość euklidesowa między tymi dwoma punktami.
Rozwiązanie: Najpierw przystępujemy do znalezienia współrzędnych kartezjańskich każdego punktu według wzoru podanego powyżej.
P1 = (3 * cos 120º, 3 * sin 120º, -4) = (-1,5, 2,60, -4)
P2 = (2 * cos 90º, 2 * sin 90º, 5) = (0, 2, 5)
Odległość euklidesowa między punktami P1 i P2 wynosi:
d (P1, P2) = √ ((0 - (-1,5))dwa+(2 - 2,60)dwa+(5 - (- 4))dwa ) = ...
… √ (2,25 + 0,36 + 81) = 9,14
Punkt P ma współrzędne kartezjańskie (-3, 4, 2). Znajdź odpowiednie współrzędne cylindryczne.
Rozwiązanie: Przystępujemy do znalezienia współrzędnych cylindrycznych, korzystając z podanych powyżej zależności:
ρ = √ (xdwa + Ydwa) = √ ((- 3)dwa + 4dwa) = √ (9 + 16) = √ (25) = 5
φ = arctan (y / x) = arctan (4 / (- 3)) = -53,13º + 180º = 126,87º
z = 2
Należy pamiętać, że funkcja arcus tangens jest wielowartościowa z okresowością 180º. Ponadto kąt φ musi należeć do drugiej ćwiartki, ponieważ współrzędne xiy punktu P znajdują się w tej ćwiartce. To jest powód, dla którego do wyniku dodano 180º.
Wyraź we współrzędnych cylindrycznych i we współrzędnych kartezjańskich powierzchnię walca o promieniu 2 i którego oś pokrywa się z osią Z.
Rozwiązanie: Rozumie się, że cylinder ma nieskończone wydłużenie w kierunku z, więc równanie tej powierzchni we współrzędnych cylindrycznych wygląda następująco:
ρ = 2
Aby otrzymać równanie kartezjańskie powierzchni cylindrycznej, przyjmuje się kwadrat obu elementów poprzedniego równania:
ρdwa = 4
Mnożymy przez 1 obu członków poprzedniej równości i stosujemy podstawowa tożsamość trygonometryczna (sendwa(φ) + cosdwa(φ) = 1):
1 * ρdwa = 1 * 4
(sendwa(φ) + cosdwa(φ)) * ρdwa = 1 * 4
Nawias jest rozwijany w celu uzyskania:
(ρ sin (φ))dwa + (ρ cos (φ))dwa = 4
Pamiętamy, że pierwszy nawias (ρ sin (φ)) to współrzędna y punktu we współrzędnych biegunowych, podczas gdy nawiasy (ρ cos (φ)) reprezentują współrzędną x, więc mamy równanie walca we współrzędnych kartezjańskich:
Ydwa + xdwa = 2dwa
Poprzednie równanie nie powinno być mylone z równaniem koła na płaszczyźnie XY, ponieważ w tym przypadku wyglądałoby to tak: ydwa + xdwa = 2dwa ; z = 0.
Cylinder o promieniu R = 1 mi wysokości H = 1 m ma masę rozłożoną promieniowo zgodnie z następującym równaniem D (ρ) = C (1 - ρ / R), gdzie C jest stałą o wartości C = 1 kg / m3. Znajdź całkowitą masę cylindra w kilogramach.
Rozwiązanie: Pierwszą rzeczą jest uświadomienie sobie, że funkcja D (ρ) reprezentuje objętościową gęstość masy i że gęstość masy jest rozłożona w cylindrycznych powłokach o malejącej gęstości od środka do obrzeża. Nieskończenie mały element objętości zgodnie z symetrią problemu to:
dV = ρ dρ 2π H
Stąd nieskończenie mała masa cylindrycznej powłoki będzie wynosić:
dM = D (ρ) dV
Dlatego całkowita masa butli będzie wyrażona w następujący sposób określona całka:
M = ∫lubR D (ρ) dV = ∫lubR C (1 - ρ / R) ρ dρ 2π H = 2π H C ∫lubR (1 - ρ / R) ρ dρ
Rozwiązanie wskazanej całki nie jest trudne, a jego wynikiem jest:
∫lubR (1 - ρ / R) ρ dρ = (⅙) Rdwa
Uwzględniając ten wynik w wyrażeniu masy cylindra, otrzymujemy:
M = 2π H C (⅙) Rdwa = ⅓ π H C Rdwa =
⅓ π 1m * 1kg / m3* 1 mdwa = π / 3 kg ≈ 1,05 kg



Jeszcze bez komentarzy