
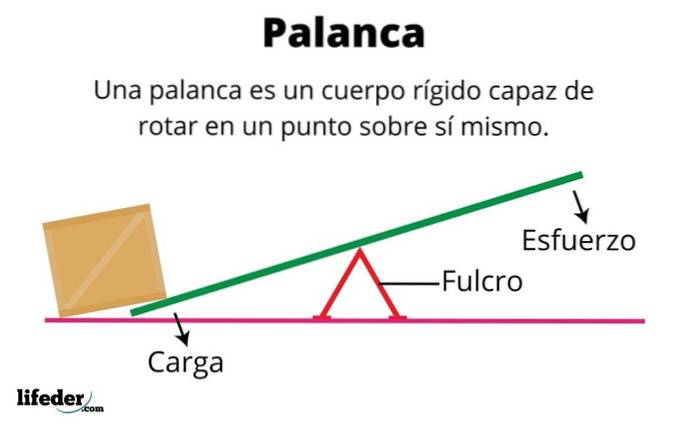
Ciało sztywne to obiekt materialny, którego cząsteczki zawsze pozostają w tych samych względnych położeniach. Dlatego jest to przedmiot, który się nie odkształca, co przypisuje się silnym siłom kohezji, które utrzymują cząstki w miejscu..
W rzeczywistości cząstki dowolnego ciała poddane siłom zewnętrznym mają tendencję do wibrowania lub poruszania się, więc obiekt zawsze się do pewnego stopnia deformuje, ale te efekty są zwykle niewielkie.
W takim przypadku można przyjąć, że ciało jest sztywne i ma bardzo dobre przybliżenie swojego zachowania, nawet jeśli jest to idealizacja.
Można wyróżnić dwa typy nadwozia sztywnego:
Podobnie jak obiekty uważane za cząstki, ciała sztywne mogą się przesuwać, obracać i mieć bardziej ogólny ruch, łączący ruch translacyjny i obrotowy.
Aby zbadać translację, nie jest konieczne analizowanie ruchu każdej cząstki oddzielnie, ale raczej ruch środka masy, punktu, w którym uważa się, że cała masa obiektu jest skoncentrowana..
Te ruchy postępowe i obrotowe mogą być:
W dynamice bryły sztywnej istotne są następujące wielkości:
Środek masy to punkt, w którym cała masa ciała jest uważana za skoncentrowaną. Jeśli jest to jednorodne i symetryczne ciało, takie jak kula, środek masy pokrywa się ze środkiem geometrycznym.
Ta wielkość skalarna jest wartością bezwładności obrotowej lub oporu, któremu obiekt przeciwstawia się obracając się wokół określonej osi. Zależy to całkowicie od geometrii obiektu i jego masy, dlatego w niektórych przypadkach łatwiej jest obracać się wokół pewnych osi niż innych..
Dla ciał o dobrze zdefiniowanych kształtach geometrycznych istnieją tabele z momentami bezwładności względem osi symetrii, na przykład ta, która przechodzi przez środek masy. Dzięki tym informacjom i twierdzeniom dotyczącym momentu bezwładności można łatwo obliczyć momenty wokół innych osi..
Do poruszenia ciała potrzebne są siły. Jeśli środek masy sztywnej bryły zostanie przesunięty, równanie ruchu, zgodnie z drugim prawem Newtona, wygląda następująco:
fanetto = M ∙docm
Gdzie:
-Siła netto wynosi fanetto
-M to masa
-Przyspieszenie środka masy wynosi docm
Jednak nie wszystkie zastosowane siły powodują obrót obiektu. Wymaga to momentu obrotowego lub momentu obrotowego, który mówi, jak efektywne jest obrotowe działanie siły. Jest definiowany jako iloczyn wektorowy między wektorem pozycji r w odniesieniu do pewnego punktu O i siły fa w pytaniu. Jest oznaczony grecką literą τ (pogrubioną czcionką, ponieważ jest to również wektor):
τ = r × fa
W międzynarodowym systemie SI jednostką momentu obrotowego jest N⋅m (niuton na metr).
W wielu przypadkach ruch obrotowy wokół osi przechodzącej przez środek masy jest opisany równaniem analogicznym do drugiej zasady Newtona:

Ruch ciała sztywnego jest opisywany przez translacje środka masy i obroty wokół tego punktu, dlatego jego energia kinetyczna ma oba wkłady.
Niech K będzie energią kinetyczną ciała, vcm prędkość środka masy, M masa ciała, I.cm jego moment bezwładności względem środka masy i ω prędkość kątowa. Można wykazać, że energia kinetyczna to:
K = ½ Mvcmdwa + ½ Jacm ωdwa
Zauważono, że drugi człon po prawej jest rotacyjnym analogiem terminu po lewej stronie. Tam moment bezwładności odgrywa taką samą rolę jak masa, podczas gdy prędkość kątowa pełni taką samą rolę jak prędkość liniowa..
Wahadło fizyczne lub prawdziwe wahadło jest bardzo łatwe do zbudowania: składa się ze sztywnej bryły, takiej jak pręt lub pręt, swobodnie oscylującej wokół osi poziomej. Oś obrotu nie przechodzi przez środek masy obiektu i może on mieć w zasadzie dowolny kształt.
Wahadło to różni się od prostego wahadła, ponieważ w tym ostatnim masa, która się na nie składa, jest uważana za punktową.

Innym przykładem dobrze znanego sztywnego nadwozia jest koło rowerowe, którego oś przechodzi przez środek ciężkości, który przechodzi przez środek koła. Dopóki nie przechyla się na bok ani nie skręca, opisane powyżej równania dynamiki mają zastosowanie do opisu jego ruchu..

Sztywny model bryłowy dobrze nadaje się do opisania ruchu kuli do kręgli na torze lub podczas toczenia bez zjeżdżania po rampie powrotnej.

Ta popularna zabawka składa się z drewnianego lub plastikowego cylindra i sznurka nawiniętego w rowek, który ją otacza..
Cylinder można zamodelować jako sztywną bryłę, w której naprężenie struny zapewnia moment obrotowy dla skrętu, natomiast ciężar (przykładany do środka masy) i naprężenie odpowiadają za pionowe przyspieszenie środka masy..


Jeszcze bez komentarzy