Plik ruch odbytniczy to ten, w którym telefon porusza się po linii prostej i dlatego biegnie w jednym wymiarze, stąd też jest nazywany ruch jednowymiarowy. Ta prosta to trajektoria lub ścieżka, po której następuje poruszający się obiekt. Samochody poruszające się aleją na rysunku 1 wykonują ten rodzaj ruchu.
To najprostszy model ruchu, jaki możesz sobie wyobrazić. Codzienne ruchy ludzi, zwierząt i rzeczy zwykle łączą ruchy w linii prostej z ruchami po łukach, ale często obserwuje się niektóre wyłącznie prostoliniowe.

Oto kilka dobrych przykładów:
- Podczas jazdy po 200-metrowym prostym torze.
- Prowadzenie samochodu po prostej drodze.
- Swobodne upuszczanie przedmiotu z określonej wysokości.
- Gdy piłka jest rzucana pionowo w górę.
Teraz cel opisu ruchu osiąga się poprzez określenie takich cech, jak:
- Pozycja
- Przemieszczenie
- Prędkość
- Przyśpieszenie
- Pogoda.
Aby obserwator mógł wykryć ruch obiektu, musi mieć punkt odniesienia (początek O) i wyznaczyć określony kierunek ruchu, którym może być oś x, Oś Y lub jakikolwiek inny.
Jeśli chodzi o obiekt, który się porusza, może mieć nieskończoną liczbę kształtów. Nie ma żadnych ograniczeń w tym względzie, jednak we wszystkim, co następuje, zakłada się, że ruchomy jest cząstką; przedmiot tak mały, że jego wymiary nie mają znaczenia.
Wiadomo, że nie dotyczy to obiektów makroskopowych; jest to jednak model z dobrymi wynikami w opisywaniu globalnego ruchu obiektu. W ten sposób cząstka może być samochodem, planetą, osobą lub innym poruszającym się obiektem.
Zaczniemy nasze badanie kinematyki prostoliniowej od ogólnego podejścia do ruchu, a następnie zostaną zbadane poszczególne przypadki, takie jak te już wymienione..
Indeks artykułów
Poniższy opis ma charakter ogólny i ma zastosowanie do każdego rodzaju ruchu jednowymiarowego. Pierwszą rzeczą jest wybór systemu referencyjnego. Linia, wzdłuż której odbywa się ruch, będzie osią x. Parametry ruchu:

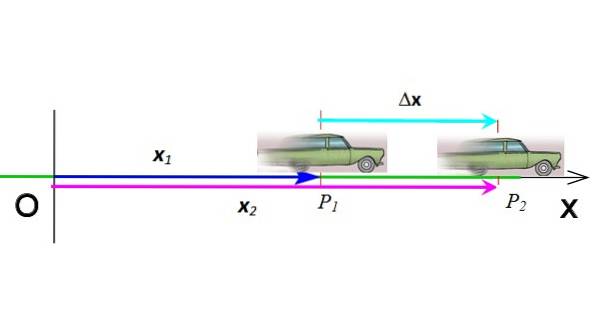
Jest to wektor, który przechodzi od początku do punktu, w którym obiekt znajduje się w danej chwili. Na rysunku 2 wektor x1 wskazuje położenie telefonu komórkowego, gdy znajduje się we współrzędnych P.1 a on na czas t1. Jednostkami wektora pozycji w systemie międzynarodowym są metrów.
Przemieszczenie jest wektorem wskazującym na zmianę położenia. Na rysunku 3 samochód ruszył z pozycji P.1 na pozycję P.dwa, dlatego jego przemieszczenie wynosi Δx = xdwa - x1. Przemieszczenie jest odejmowaniem dwóch wektorów, jest symbolizowane grecką literą Δ („delta”) i jest z kolei wektorem. Jej jednostkami w systemie międzynarodowym są metrów.
Wektory w drukowanym tekście są oznaczone pogrubioną czcionką. Ale będąc w tym samym wymiarze, jeśli chcesz, możesz obejść się bez notacji wektorowej.
Dystans re przebyty przez poruszający się obiekt jest wartością bezwzględną wektora przemieszczenia:
d = ΙΔxΙ = Δx
Będąc wartością bezwzględną, przebyta odległość jest zawsze większa lub równa 0, a jej jednostki są takie same jak jednostki położenia i przemieszczenia. Notację wartości bezwzględnej można wykonać za pomocą słupków modulo lub po prostu usuwając pogrubioną czcionkę w drukowanym tekście.
Jak szybko zmienia się pozycja? Istnieją wolne telefony komórkowe i szybkie telefony komórkowe. Kluczem zawsze była szybkość. Aby przeanalizować ten czynnik, analizowana jest pozycja x funkcja czasu t.
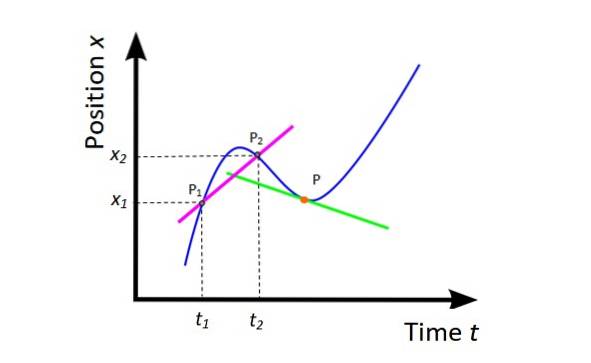
Średnia prędkość vm (patrz rysunek 4) to nachylenie linii siecznej (fuksja) do krzywej x vs t i dostarcza globalnych informacji o ruchu telefonu komórkowego w rozpatrywanym przedziale czasowym.
vm = (xdwa - x1) / (tdwa -t1) = Δx / Δt
Średnia prędkość to wektor, którego jednostki w układzie międzynarodowym są metry / sekundę (SM).
Średnia prędkość jest obliczana na podstawie mierzalnego przedziału czasu, ale nie informuje o tym, co dzieje się w tym przedziale. Aby poznać prędkość w dowolnym momencie, musisz sprawić, by przedział czasu był bardzo mały, matematycznie jest to równoważne z zrobieniem:
Δt → 0
Powyższe równanie dotyczy średniej prędkości. W ten sposób uzyskuje się prędkość chwilową lub po prostu prędkość:
Z geometrycznego punktu widzenia pochodną położenia względem czasu jest nachylenie prostej stycznej do krzywej x vs t w danym momencie. Na rysunku 4 punkt jest pomarańczowy, a linia styczna jest zielona. Prędkość chwilowa w tym punkcie jest nachyleniem tej prostej.
Prędkość jest definiowana jako wartość bezwzględna lub moduł prędkości i jest zawsze dodatnia (znaki, drogi i autostrady są zawsze dodatnie, nigdy ujemne). Terminy „prędkość” i „prędkość” mogą być używane zamiennie na co dzień, ale w fizyce konieczne jest rozróżnienie między wektorem a skalarem.
v = ΙvΙ = v
Prędkość może się zmieniać w trakcie ruchu i w rzeczywistości jest to oczekiwane. Istnieje wielkość, która określa ilościowo tę zmianę: przyspieszenie. Jeśli zauważymy, że prędkość jest zmianą położenia w stosunku do czasu, przyspieszenie jest zmianą prędkości w stosunku do czasu.
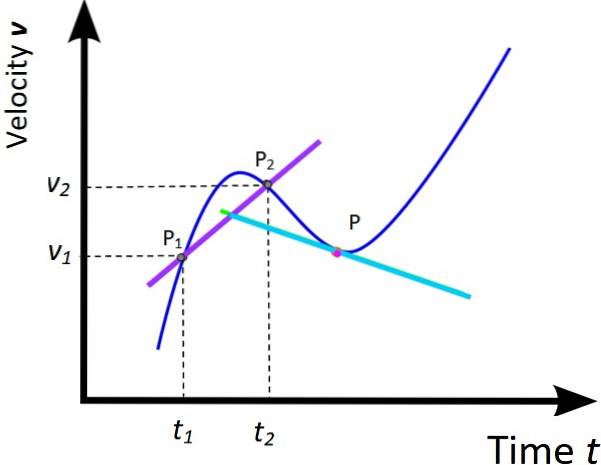
Leczenie podane na wykresie x vs t z dwóch poprzednich sekcji można rozszerzyć do odpowiedniego wykresu v vs t. W konsekwencji średnie przyspieszenie i chwilowe przyspieszenie definiuje się jako:
dom = (vdwa - v1) / (tdwa -t1) = Δv / Δt (Nachylenie fioletowej linii)
W ruchu jednowymiarowym wektory zgodnie z konwencją mają znaki dodatnie lub ujemne, w zależności od tego, czy poruszają się w jedną czy drugą stronę. Kiedy przyspieszenie ma ten sam kierunek co prędkość, zwiększa swoją wielkość, ale gdy ma kierunek przeciwny, a prędkość zmniejsza swoją wielkość. Mówi się wtedy, że ruch jest opóźniony.
Ogólnie klasyfikacja ruchów prostoliniowych opiera się na:
- Czy przyspieszenie jest stałe, czy nie.
- Ruch przebiega wzdłuż linii poziomej lub pionowej.
Gdy przyspieszenie jest stałe, średnie przyspieszenie dom równa się chwilowemu przyspieszeniu do i są dwie możliwości:
- Przyspieszenie jest równe 0, w którym to przypadku prędkość jest stała i występuje jednolity ruch prostoliniowy lub MRU.
- Stałe przyspieszenie inne niż 0, w którym prędkość rośnie lub maleje liniowo w czasie (jednolicie zmienny ruch prostoliniowy lub MRUV):
Gdzie vfa Y tfa są odpowiednio końcową prędkością i czasem, i vlub Y tlub są to początkowa prędkość i czas. tak tlub = 0, Szukając prędkości końcowej, mamy już znane równanie na prędkość końcową:
vfa = wlub + w
Dla tego ruchu obowiązują również następujące równania:
- Pozycja w funkcji czasu: x = xlub + vlub .t + ½ wdwa
- Prędkość jako funkcja położenia: vfadwa = wlubdwa + 2nd.Δx (Z Δx = x - xlub)
Ruchy poziome to takie, które odbywają się wzdłuż osi poziomej lub osi x, podczas gdy ruchy pionowe odbywają się wzdłuż osi y. Najczęstsze i najciekawsze są ruchy pionowe pod działaniem grawitacji.
W poprzednich równaniach bierzemy a = g = 9,8 m / sdwa skierowany pionowo w dół, kierunek, który jest prawie zawsze wybierany ze znakiem ujemnym.
W ten sposób, vfa = wlub + w Przekształca się w vfa = wlub - gt a jeśli prędkość początkowa wynosi 0, ponieważ obiekt został upuszczony swobodnie, upraszcza się dalej vfa = - gt. Oczywiście pod warunkiem, że nie uwzględni się oporu powietrza.
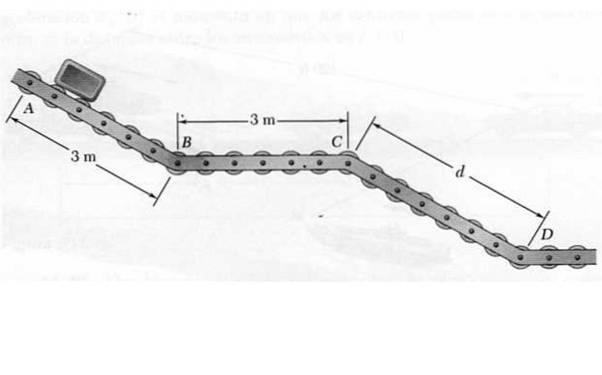
W punkcie A zwalniana jest mała paczka, aby poruszać się po przenośniku z przesuwanymi kołami ABCD pokazanymi na rysunku. Podczas zjazdu ze stoków AB i CD pakiet ma stałe przyspieszenie 4,8 m / sdwa, podczas gdy w odcinku poziomym BC utrzymuje stałą prędkość.
Wiedząc, że prędkość z jaką pakiet dociera do D wynosi 7,2 m / s, określ:
a) Odległość między C i D.
b) Czas potrzebny do zakończenia paczki.
Ruch opakowania odbywa się w trzech pokazanych prostoliniowych odcinkach i aby obliczyć żądaną prędkość, wymagana jest prędkość w punktach B, C i D. Przeanalizujmy każdą sekcję osobno:
Ponieważ czas nie jest dostępny w tej sekcji, zostanie wykorzystany vfadwa = wlubdwa + 2nd.Δx z vo = 0:
vfadwa = 2a.Δx → vfadwa= 2,4,8 m / sdwa . 3 m = 28,8 mdwa/ sdwa → vfa = 5,37 m / s = vb
Czas potrzebny na przebycie odcinka AB przez pakiet to:
tAB = (wfa - vlub) / a = 5,37 m / s / 4,8 m / sdwa = 1.19 s
Dlatego prędkość w przekroju BC jest stała vb = wdo = 5,37 m / s. Czas potrzebny na przebycie tej sekcji przez pakiet to:
tpne = odległość pne / vb = 3 m / 5,37 m / s = 0,56 s
Początkowa prędkość tego odcinka wynosi vdo = 5,37 m / s, końcowa prędkość to vre = 7,2 m / s, wg vredwa = wdodwa + 2. a. re wartość jest wyczyszczona re:
d = (vredwa - vdodwa) /2.a = (7.2dwa - 5.37dwa)/dwa x 4,8 m = 2,4 m
Czas liczony jest jako:
tCD = (wre - vdo) / a = (7,2 - 5,37) / 4,8 s = 0,38 s.
Odpowiedzi na postawione pytania to:
a) d = 2,4 m
b) Czas podróży to tAB + tpne + tPłyta CD = 1,19 s +0,56 s +0,38 s = 2,13 s.
Osoba znajduje się pod poziomą bramą, która jest początkowo otwarta i ma 12 m wysokości. Osoba pionowo rzuca przedmiot w kierunku bramy z prędkością 15 m / s.
Wiadomo, że brama zamyka się 1,5 sekundy po tym, jak osoba wyrzuciła przedmiot z wysokości 2 metrów. Opór powietrza nie będzie brany pod uwagę. Odpowiedz na następujące pytania, uzasadniając:
a) Czy obiekt może przejść przez bramę, zanim się zamknie?
b) Czy obiekt kiedykolwiek zderzy się z zamkniętą bramą? Jeśli tak, kiedy tak?
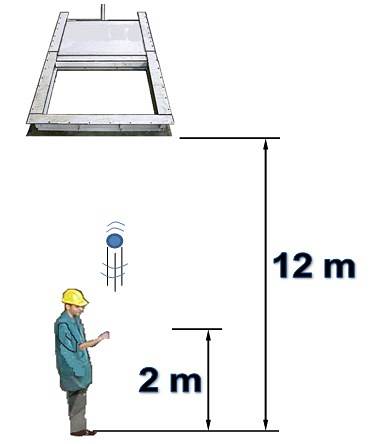
Odległość między początkową pozycją piłki a bramą wynosi 10 metrów. Jest to pionowy rzut w górę, w którym ten kierunek jest traktowany jako dodatni.
Możesz dowiedzieć się, jaką prędkość zajmuje osiągnięcie tej wysokości, w wyniku tego obliczany jest czas potrzebny na to i porównany z czasem zamykania bramy, który wynosi 1,5 sekundy:
vfa dwa= wlub dwa- 2 g. Δi → vfa = (15dwa - dwa x 9.8 x10)1/2 m = 5,39 m / s
t = (wfa - vlub) / g = (5,39 - 15) / (-9,8) s = 0,98 s
Ponieważ czas ten jest krótszy niż 1,5 sekundy, można wyciągnąć wniosek, że obiekt może przejść przez bramę przynajmniej raz.
Wiemy już, że obiekt udaje się przejść przez bramę, idąc w górę, zobaczmy, czy daje mu szansę na ponowne przejście podczas zejścia. Prędkość, gdy osiąga wysokość bramy, ma taką samą wielkość, jak podczas jazdy pod górę, ale w przeciwnym kierunku. Dlatego pracujemy z -5,39 m / s, a czas potrzebny do osiągnięcia takiej sytuacji to:
t = (wfa - vlub) / g = (-5,39 - 15) / (-9,8) s = 2,08 s
Ponieważ brama pozostaje otwarta tylko przez 1,5 s, jest oczywiste, że nie ma czasu ponownie przejść przed zamknięciem, ponieważ stwierdza, że jest zamknięta. Odpowiedź brzmi: obiekt, jeśli zderzy się z zamkniętym włazem po 2,08 sekundach od rzucenia, gdy już opada.

Jeszcze bez komentarzy