
Plik prędkość liniowa definiuje się go jako to, co jest zawsze styczne do ścieżki, po której podąża cząstka, niezależnie od jej kształtu. Jeśli cząstka zawsze porusza się po prostoliniowej ścieżce, nie ma problemu z wyobrażeniem sobie, jak wektor prędkości podąża za tą linią prostą.
Jednak generalnie ruch odbywa się po dowolnie ukształtowanej krzywej. Każda część krzywej może być modelowana tak, jakby była częścią okręgu o promieniu do, który w każdym punkcie jest styczny do podążanej ścieżki.
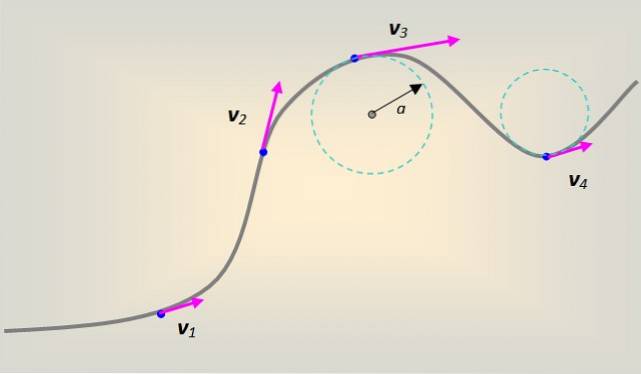
W tym przypadku prędkość liniowa towarzyszy krzywej stycznie i przez cały czas w każdym jej punkcie..
Matematycznie chwilowa prędkość liniowa jest pochodną położenia względem czasu. Być r wektor pozycji cząstki w jednej chwili t, wtedy prędkość liniową wyraża wyrażenie:
v = r'(t) = dr / dt
Oznacza to, że prędkość liniowa lub prędkość styczna, jak się ją często nazywa, to nic innego jak zmiana położenia względem czasu..
Indeks artykułów
Kiedy ruch odbywa się na obwodzie, możemy podejść do cząstki w każdym punkcie i zobaczyć, co dzieje się w dwóch bardzo szczególnych kierunkach: jednym z nich jest ten, który zawsze wskazuje na środek. To jest adres promieniowy.
Drugim ważnym kierunkiem jest ten, który przechodzi po obwodzie, to jest kierunek styczny i prędkość liniowa zawsze to ma.
W przypadku jednostajnego ruchu kołowego należy zdać sobie sprawę, że prędkość nie jest stała, ponieważ wektor zmienia swój kierunek w miarę obracania się cząstki, ale jego moduł (wielkość wektora), czyli prędkość, tak pozostaje niezmieniony.
Dla tego ruchu pozycja w funkcji czasu jest określona wzorem s (t), gdzie s czy on jest przebieg łuku Y t Już czas. W takim przypadku prędkość chwilową podaje wyrażenie v = ds / dt i to jest stałe.
Jeśli wielkość prędkości również się zmienia (wiemy już, że kierunek zawsze się zmienia, w przeciwnym razie telefon komórkowy nie mógłby się obracać), mamy do czynienia ze zróżnicowanym ruchem okrężnym, podczas którego ruchomy ruchomy oprócz skrętu może hamować lub przyspieszać.
Ruch cząstki można również zobaczyć z punktu widzenia kąt zamiatania, zamiast robić to z łuku. W takim przypadku mówimy o prędkość kątowa. Do ruchu na obwodzie o promieniu R, istnieje zależność między łukiem (w radianach) a kątem:
s = R θ
Wyprowadzanie w odniesieniu do czasu po obu stronach:
ds / dt = R (dθ/ dt)
Wywołanie pochodnej θ w odniesieniu do t Co prędkość kątowa i oznaczając ją grecką literą ω "omega", mamy następującą zależność:
v = ωR
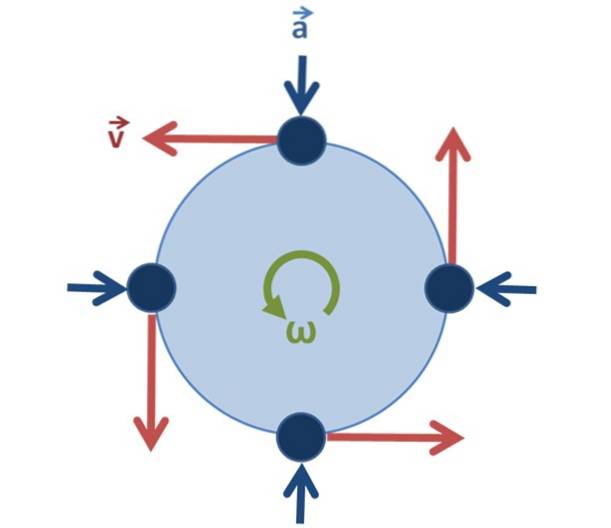
Wszystkie ruchy okrężne mają przyspieszenie dośrodkowe, który jest zawsze skierowany w stronę środka obwodu. Zapewnia, że prędkość zmienia się, aby poruszać się wraz z obracającą się cząstką.
Przyspieszenie dośrodkowe dodo lub doR zawsze wskazuje środek (patrz rysunek 2) i jest powiązany z prędkością liniową w następujący sposób:
dodo = wdwa / R
A z prędkością kątową jako:
dodo = (ωR)dwa / R = ωdwaR
Aby uzyskać równomierny ruch okrężny, położenie s (t) ma postać:
s (t) = so + vt
Ponadto zróżnicowany ruch kołowy musi mieć składową przyspieszenia zwaną przyspieszenie styczne doT, który dotyczy zmiany wielkości prędkości liniowej. tak doT to jest stałe, pozycja to:
s (t) = slub + vlubt + ½ aTtdwa
Z vlub jako prędkość początkowa.

Rozwiązane problemy prędkości liniowej
Rozwiązane ćwiczenia pomagają wyjaśnić prawidłowe użycie podanych powyżej pojęć i równań..
Owad porusza się po półkolu o promieniu R = 2 m, zaczynając od spoczynku w punkcie A, zwiększając jednocześnie prędkość liniową z prędkością p m / sdwa. Znajdź: a) po jakim czasie osiąga punkt B, b) wektor prędkości liniowej w tej chwili, c) wektor przyspieszenia w tej chwili.
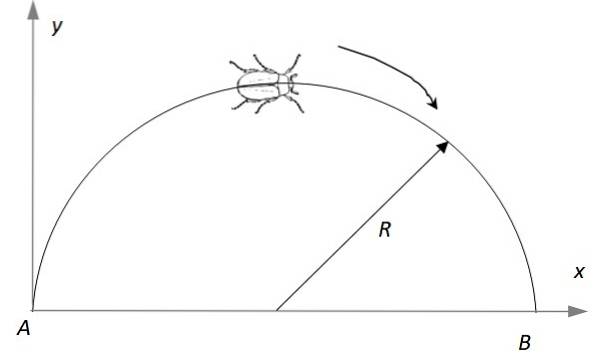
a) Stwierdzenie wskazuje, że przyspieszenie styczne jest stałe i równe π m / sdwa, wtedy można zastosować równanie dla ruchu jednostajnie zmiennego:
s (t) = slub + vlubt + ½ aT.tdwa
Dzięki slub = 0 i vlub = 0:
s (t) = ½ aT.tdwa
s = πR (Połowa długości obwodu)
t = (2. πR /doT) ½ s = (2π.2 / π)½s = 2 s
b) v (t) = vlub + doT. t = 2π SM
W punkcie B liniowy wektor prędkości wskazuje kierunek pionowy w dół w kierunku (-Y):
v (t) = 2π SM(-Y)
c) Mamy już przyspieszenie styczne, brakuje przyspieszenia dośrodkowego, aby mieć wektor prędkości do:
dodo = wdwa / R = (2π)dwa / 2 m / sdwa = 2πdwa SMdwa
do = ado (-x) + aT (-Y) = 2πdwa(-x) + π (-Y) SMdwa
Cząstka obraca się po okręgu o promieniu 2,90 m. W określonym momencie jego przyspieszenie wynosi 1,05 m / sdwa w takim kierunku, że tworzy 32 ° z kierunkiem ruchu. Znajdź jego prędkość liniową w: a) tym momencie, b) 2 sekundy później, zakładając, że przyspieszenie styczne jest stałe.
a) Kierunek ruchu jest dokładnie kierunkiem stycznym:
doT = 1,05 m / sdwa . cos 32º = 0,89 m / sdwa ; dodo = 1,05 m / sdwa . sin 32º = 0,56 m / sdwa
Szybkość usuwa się z dodo = wdwa / R Co:
v = (R.ado)1/2 = 1,27 m / s
b) Poniższe równanie obowiązuje dla ruchu jednostajnego: v = vlub + doTt = 1,27 + 0,89,2dwa m / s = 4,83 m / s


Jeszcze bez komentarzy