Plik trajektoria w fizyce Jest to krzywa, którą opisuje telefon komórkowy, przechodząc przez kolejne punkty podczas swojego ruchu. Ponieważ może przyjąć nieskończoną liczbę wariantów, podobnie będzie z trajektoriami, którymi może podążać telefon komórkowy.
Aby dostać się z jednego miejsca do drugiego, można iść różnymi ścieżkami i różnymi drogami: pieszo po chodnikach na ulicach i alejach lub przyjeżdżając samochodem lub motocyklem autostradą. Podczas spaceru po lesie spacerowicz może podążać skomplikowaną ścieżką, która obejmuje zakręty, wchodzenie lub schodzenie w poziomie, a nawet kilkakrotne przechodzenie przez ten sam punkt.
Jeśli punkty, przez które porusza się telefon, przebiegają po linii prostej, to trajektoria będzie prostoliniowa. To najprostsza ścieżka, ponieważ jest jednowymiarowa. Określenie pozycji wymaga podania jednej współrzędnej.
Ale telefon komórkowy może podążać krzywoliniową ścieżką, będąc w stanie zamknąć lub otworzyć. W takich przypadkach śledzenie pozycji wymaga dwóch lub trzech współrzędnych. Są to odpowiednio ruchy w płaszczyźnie i w przestrzeni. To ma związek z spinki do mankietów: warunki materialne ograniczające ruch. Oto kilka przykładów:
- Orbity opisujące planety wokół Słońca to zamknięte ścieżki w kształcie elips. Chociaż w niektórych przypadkach można je przybliżyć do koła, jak w przypadku Ziemi.
- Piłka, którą bramkarz kopie podczas wybicia od bramki, ma trajektorię paraboliczną.
- Ptak w locie opisuje krzywoliniowe trajektorie w przestrzeni, ponieważ oprócz poruszania się w samolocie może dowolnie poruszać się w górę lub w dół.
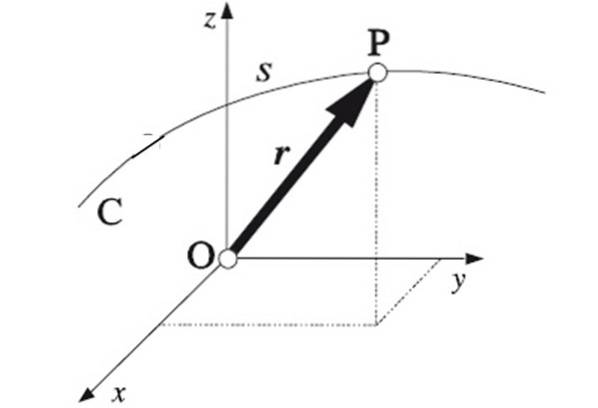
Trajektorię w fizyce można wyrazić matematycznie, gdy pozycja telefonu komórkowego jest znana w dowolnym momencie. Być r wektor położenia, który z kolei ma współrzędne x, Y Y z w najbardziej ogólnym przypadku ruchu w trzech wymiarach. Znajomość funkcji r (t) trajektoria zostanie całkowicie określona.
Indeks artykułów
Ogólnie rzecz biorąc, trajektoria może być dość skomplikowaną krzywą, zwłaszcza jeśli chcesz ją wyrazić matematycznie. Z tego powodu zaczyna się od najprostszych modeli, w których telefony komórkowe poruszają się po linii prostej lub po płaszczyźnie, która może być podłogą lub inną odpowiednią:
Najczęściej badane trajektorie to:
- Prostoliniowy, podczas jazdy po prostej poziomej, pionowej lub pochyłej. Piłka rzucona pionowo w górę podąża tą ścieżką lub obiekt ześlizgujący się po pochyłości. Są to ruchy jednowymiarowe, wystarczy jedna współrzędna, aby całkowicie określić ich położenie..
- Paraboliczny, w którym telefon opisuje łuk paraboli. Jest to częste, ponieważ każdy obiekt rzucony ukośnie pod działaniem grawitacji (pocisk) podąża za tą trajektorią. Aby określić położenie telefonu komórkowego, musisz podać dwie współrzędne: x Y Y.
- Okólnik, występuje, gdy poruszająca się cząstka podąża za kołem. Występuje również w przyrodzie i codziennej praktyce. Wiele przedmiotów codziennego użytku porusza się po okrągłej ścieżce, takich jak opony, części maszyn i satelity na orbicie, by wymienić tylko kilka..
- Eliptyczny, obiekt porusza się po elipsie. Jak powiedziano na początku, jest to ścieżka, którą podążają planety krążące wokół Słońca.
- Hiperboliczny, Obiekty astronomiczne pod działaniem siły centralnej (grawitacji) mogą poruszać się po trajektoriach eliptycznych (zamkniętych) lub hiperbolicznych (otwartych), które są rzadsze niż poprzednie.
- Śrubowaty, lub ruch spiralny, jak ruch ptaka wznoszącego się w prądzie termicznym.
- Huśtawka lub wahadło, telefon komórkowy opisuje łuk w ruchach w przód iw tył.
Trajektorie opisane w poprzedniej sekcji są bardzo przydatne, aby szybko zorientować się, jak porusza się obiekt. W każdym razie konieczne jest wyjaśnienie, że trajektoria telefonu komórkowego zależy od lokalizacji obserwatora. Oznacza to, że to samo wydarzenie można zobaczyć na różne sposoby, w zależności od tego, gdzie jest każda osoba..
Na przykład dziewczyna pedałuje ze stałą prędkością i rzuca piłką w górę. Zauważa, że piłka wyznacza prostoliniową ścieżkę.
Jednak dla obserwatora stojącego na drodze, który widzi, jak przechodzi, piłka będzie miała ruch paraboliczny. Dla niego początkowo piłka była rzucana z nachyloną prędkością, będącą wynikiem przyspieszenia ręki dziewczyny w górę oraz prędkości roweru..
- Wyraźny, bezpośrednio określając krzywą lub miejsce podane w równaniu y (x)
- Domniemany, w którym krzywa jest wyrażona jako f (x, y, z) = 0
-Parametryczne, w tej postaci współrzędne x, yiz są podane jako funkcja parametru, który jest zwykle wybierany jako czas t. W tym przypadku trajektoria składa się z funkcji: x (t), oraz T) Y z (t).
Następnie szczegółowo omówiono dwie trajektorie, które były szeroko badane w kinematyce: trajektorię paraboliczną i trajektorię kołową..
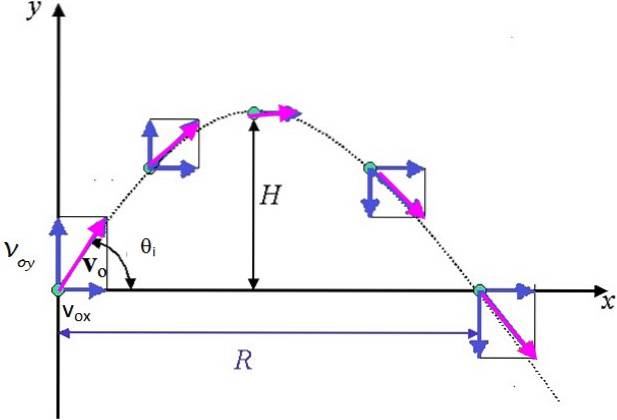
Obiekt (pocisk) jest rzucany pod kątem a do poziomu iz prędkością początkową vlub jak pokazuje obrazek. Opór powietrza nie jest brany pod uwagę. Ruch można potraktować jako dwa niezależne i jednoczesne ruchy: jeden poziomy ze stałą prędkością, a drugi pionowy pod działaniem grawitacji..
x (t) = xlub +vwół.t
y (t) = ylub +vHej.t -½g.tdwa
Te równania są równania parametryczne wystrzelenie pocisku. Jak wyjaśniono powyżej, mają parametr t, czym jest czas.
W prawym trójkącie na rysunku widać:
vwół = wlub cos θja
vHej = wlub sen θja
Podstawiając te równania zawierające kąt startu do równań parametrycznych, otrzymujemy:
x (t) = xlub +vlub cos θja.t
y (t) = ylub +vlub. sen θja.t -½g.tdwa
Jawne równanie ścieżki można znaleźć rozwiązując t z równania dla x (t) i podstawiając w równaniu y (t). Aby ułatwić pracę algebraiczną, można założyć, że początek (0,0) znajduje się w punkcie startowym, a zatem xlub = ilub = 0.
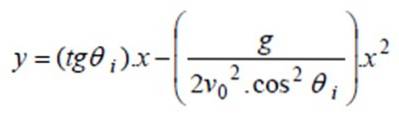
To jest równanie ścieżki w wyraźny sposób.
Okrągła ścieżka jest określona wzorem:
(x - xlub)dwa + (i ilub)dwa = R.dwa

Tutaj xlub i ilub reprezentują środek okręgu opisanego przez telefon komórkowy, a R jest jego promieniem. P (x, y) to punkt na ścieżce. Z zacienionego prawego trójkąta (rysunek 3) widać, że:
x = R. cos θ
y = R. sin θ
W tym przypadku parametrem jest kąt skosu θ, zwany przemieszczeniem kątowym. W szczególnym przypadku, gdy prędkość kątowa ω (kąt przemiatania w jednostce czasu) jest stała, można stwierdzić, że:
θ = θlub + ωt
Gdzie θlub jest początkowym położeniem kątowym cząstki, które przyjmowane jako 0 zmniejsza się do:
θ = ωt
W takim przypadku czas powraca do równań parametrycznych, takich jak:
x = R.cos ωt
y = R. sin ωt
Wektory jednostkowe ja Y jot są bardzo wygodne przy zapisywaniu funkcji pozycji obiektu r (t). Wskazują kierunki na osi x i na osi Y odpowiednio. W swoich terminach pozycja cząstki opisującej jednolity ruch kołowy jest następująca:
r (t) = R. cos ωt ja + R. sen ωt jot
Armata może wystrzelić pocisk z prędkością 200 m / si kątem 40º względem poziomu. Jeśli rzut jest na płaskim podłożu, a opór powietrza jest zaniedbany, znajdź:
a) Równanie ścieżki y (x) ...
b) Równania parametryczne x (t) Y oraz T).
c) Zasięg poziomy i czas trwania pocisku w powietrzu.
d) Wysokość, na której pocisk znajduje się, gdy x = 12 000 m
a) Aby znaleźć trajektorię, należy podstawić wartości podane w równaniu y (x) z poprzedniej sekcji:
y (x) = tg 40º. x - 9,8 / (2 „400dwa. sałatadwa40-ty) xdwa ⇒ y (x) = 0,8391 x - 0,0000522xdwa
b) Punkt startowy jest wybrany w początku układu współrzędnych (0,0):
x (t) = xlub +vwół.t = 400„cos 40º.t = 306,42. t.
y (t) = ylub +vHej.t -½g.tdwa= 400 „sin 40º.t - 0,5 „9.8'tdwa= 257,12 t - 4,9 tdwa
c) Aby znaleźć czas, w którym pocisk pozostaje w powietrzu, zrób y (t) = 0, będąc startem odbywa się na płaskim podłożu:
0 = 257,12 t - 4,9 tdwa
t = 257,12 / 4,9 s = 52,473 s
Maksymalny zasięg poziomy można znaleźć, zastępując tę wartość w x (t):
xmax = 306,4252,47 m = 16077,7 m
Inny sposób na znalezienie xmax bezpośrednio polega na zrobieniu y = 0 w równaniu ścieżki:
0 = 0,8391 xmax - 0,0000522 xdwamax
x = 0,8391 / 0,0000522 m = 16078,5 m
Istnieje niewielka różnica ze względu na zaokrąglenie liczb dziesiętnych.
d) Aby znaleźć wysokość, gdy x = 12000 m, wartość ta jest podstawiana bezpośrednio w równaniu ścieżki:
i (12000) = 0,8391„12000 - 0,0000522„12000dwa m = 2552,4 m
Funkcja pozycji obiektu jest określona wzorem:
r (t) = 3t ja + (4 -5tdwa) jot m
Odnaleźć:
a) Równanie ścieżki. Jaka to krzywa?
b) Pozycja początkowa i pozycja, gdy t = 2 s.
c) Przemieszczenie wykonane po t = 2 s.
a) Funkcja pozycji została podana w postaci wektorów jednostkowych ja Y jot, które odpowiednio określają kierunek na osiach x Y Y, A zatem:
x (t) = 3t
oraz T) = 4 -5tdwa
Równanie ścieżki y (x) się rozjaśnia t z x (t) i podstawiając w y (t):
t = x / 3
y (x) = 4-5. (x / 3)dwa = 4 - 5xdwa/ 9 (przypowieść)
b) Pozycja wyjściowa to: r (2) = 4 jot m ; pozycja w t = 2 s to jest r (2) = 6 ja -16 jot m
c) Przemieszczenie rer jest odjęciem dwóch wektorów pozycji:
Δr = r (dwa) - r (2) = 6 ja -16 jot- 4 jot = 6 ja - dwadzieścia jot m
Ziemia ma promień R = 6300 km i wiadomo, że okres jej ruchu obrotowego wokół własnej osi wynosi jeden dzień. Odnaleźć:
a) Równanie trajektorii punktu na powierzchni ziemi i funkcja jego położenia.
b) Prędkość i przyspieszenie tego punktu.
a) Funkcja pozycji dla dowolnego punktu na orbicie kołowej to:
r (t) = R. cos ωt ja + R.sen ωt jot
Mamy promień Ziemi R, ale nie prędkość kątową ω, jednak można ją obliczyć z okresu, wiedząc, że dla ruchu kołowego można powiedzieć, że:
ω = 2π × częstotliwość = 2π / Kropka
Okres ruchu wynosi: 1 dzień = 24 godziny = 1440 minut = 86400 sekund, dlatego:
ω = 2π / 86400 s = 0,000023148 s-1
Podstawiając w funkcji pozycji:
r (t) = R. cos ωt ja + R. sen ωt j = 6300 (cos 0,000023148t ja + sen 0.000023148t jot) Km
Ścieżka w postaci parametrycznej to:
x (t) = 6300. cos 0,000023148t
y (t) = 6300. sin 0,000023148t
b) Dla ruchu kołowego - wielkość prędkości liniowej v punktu jest związane z prędkością kątową w przez:
v = ωR = 0,000023148 sek-1„6300 km = 0,1458 km / s = 145,8 m / s
Nawet będąc ruchem o stałej prędkości 145,8 m / s, istnieje przyspieszenie, które wskazuje w kierunku środka orbity kołowej, odpowiadające za utrzymywanie punktu w ruchu obrotowym. Jest to przyspieszenie dośrodkowe dodo, podane przez:
dodo = wdwa / R = (145,8 m / s)dwa / 6300 × 103 m = 0,00337 m / sdwa.


Jeszcze bez komentarzy