Plik wektory współliniowe Są jednym z trzech typów istniejących wektorów. To są te wektory, które są w tym samym kierunku lub linii działania. Oznacza to, że: dwa lub więcej wektorów będzie współliniowych, jeśli zostaną ułożone w liniach równoległych do siebie.
Wektor definiuje się jako wielkość przyłożoną do ciała i charakteryzuje się kierunkiem, zmysłem i skalą. Wektory można znaleźć w płaszczyźnie lub w przestrzeni i mogą mieć różne typy: wektory współliniowe, wektory współbieżne i wektory równoległe.
Indeks artykułów
Wektory są współliniowe, jeśli linia działania jednego jest dokładnie taka sama jak linia działania wszystkich innych wektorów, niezależnie od rozmiaru i kierunku każdego z wektorów.
Wektory są używane jako reprezentacje w różnych dziedzinach, takich jak matematyka, fizyka, algebra, a także w geometrii, gdzie wektory są współliniowe tylko wtedy, gdy ich kierunek jest taki sam, niezależnie od tego, czy ich sens jest inny..
- Dwa lub więcej wektorów jest współliniowych, jeśli związek między współrzędnymi jest równy.
Mamy wektory m = m_x; m_y i n = n_x; n_y. Są to współliniowe, jeśli:
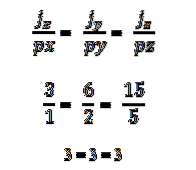
- Dwa lub więcej wektorów jest współliniowych, jeśli iloczyn wektorowy lub mnożenie jest równe zero (0). Dzieje się tak, ponieważ w układzie współrzędnych każdy wektor jest scharakteryzowany za pomocą odpowiednich współrzędnych i jeśli są one do siebie proporcjonalne, wektory będą współliniowe. Wyraża się to w następujący sposób:
Mamy wektory a = (10, 5) i b = (6, 3). Aby określić, czy są one współliniowe, stosuje się teorię determinanty, która ustala równość iloczynów krzyżowych. Dlatego musisz:
Wektory współliniowe są reprezentowane graficznie z wykorzystaniem ich kierunku i zwrotu - biorąc pod uwagę, że muszą one przechodzić przez punkt zastosowania - oraz modułu, którym jest określona skala lub długość..
Układ wektorów współliniowych powstaje, gdy dwa lub więcej wektorów działa na obiekt lub ciało, reprezentując siłę i działając w tym samym kierunku..
Na przykład, jeśli dwie współliniowe siły zostaną przyłożone do ciała, ich wypadkowa będzie zależeć tylko od kierunku, w którym one działają. Istnieją trzy przypadki, którymi są:
Wypadkowa dwóch wektorów współliniowych jest równa sumie tych:
R = ∑ F = F.1 + fadwa.
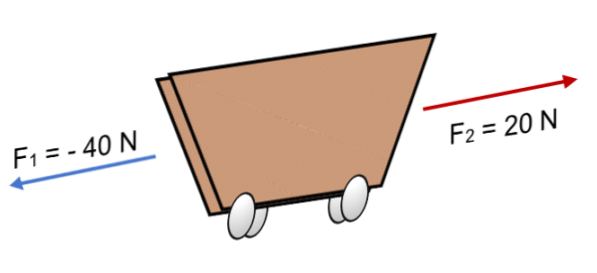
Jeśli dwie siły F działają na wózek1 = 40 N i F.dwa = 20 N w przeciwnym kierunku (jak pokazano na rysunku), wynikiem jest:
R = ∑ F = (- 40 N) + 20N.
R = - 20 N..
Wielkość siły wypadkowej będzie równa sumie wektorów współliniowych:
R = ∑ F = F.1 + fadwa.
Jeśli dwie siły F działają na wózek1 = 35 N i F.dwa = 55 N w tym samym kierunku (jak pokazano na rysunku), wynikiem jest:
R = ∑ F = 35 N + 55N.
R = 90 N..
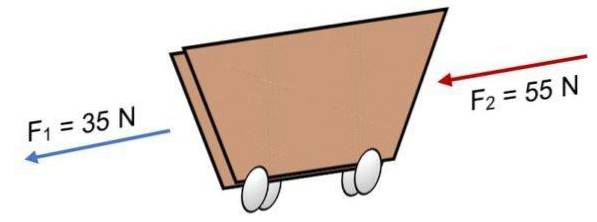
Wynik dodatni wskazuje, że wektory współliniowe działają w lewo.
Wynik dwóch wektorów współliniowych będzie równy sumie wektorów współliniowych:
R = ∑ F = F.1 + fadwa.
Ponieważ siły mają tę samą wielkość, ale w przeciwnym kierunku - to znaczy, że jedna będzie dodatnia, a druga ujemna - po dodaniu dwóch sił wypadkowa będzie równa zero..
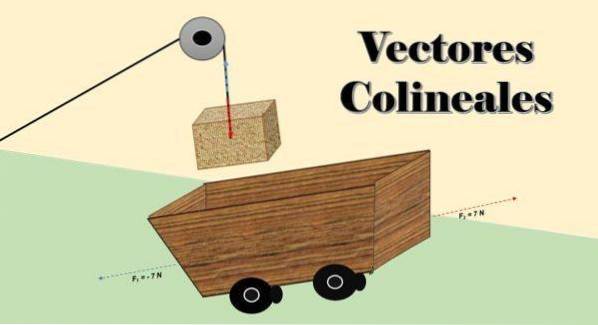
Jeśli dwie siły F działają na wózek1 = -7 N i F.dwa = 7 N, które mają tę samą wielkość, ale w przeciwnym kierunku (jak pokazano na obrazku), wynikiem jest:
R = ∑ F = (-7 N) + 7N.
R = 0.
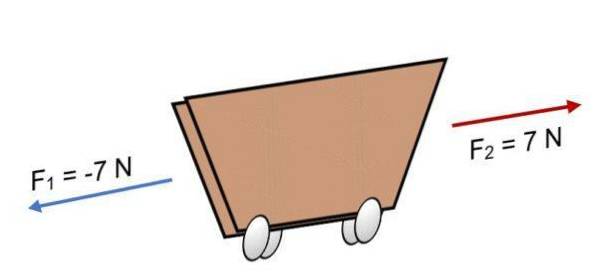
Ponieważ wypadkowa jest równa 0, oznacza to, że wektory równoważą się i dlatego ciało jest w równowadze lub w spoczynku (nie będzie się poruszać).
Wektory współliniowe charakteryzują się tym, że mają ten sam kierunek w tej samej linii lub są równoległe do prostej; to znaczy są wektorami kierunkowymi linii równoległych.
Współbieżne wektory są zdefiniowane, ponieważ znajdują się na różnych liniach działania, które przecinają się w jednym punkcie..
Innymi słowy, mają ten sam punkt początkowy lub docelowy - niezależnie od ich modułu, kierunku lub kierunku - tworząc między nimi kąt..
Współbieżne układy wektorowe są rozwiązywane metodami matematycznymi lub graficznymi, którymi są metoda równoległoboku sił i metoda wielokąta sił. Za ich pomocą zostanie określona wartość wynikowego wektora, który wskazuje kierunek, w którym ciało będzie się poruszać.
Zasadniczo główną różnicą między wektorami współliniowymi i współbieżnymi jest linia działania, w której one działają: współliniowe działają w tej samej linii, podczas gdy współbieżne w różnych.
Oznacza to, że wektory współliniowe działają w jednej płaszczyźnie „X” lub „Y”; a te współbieżne działają w obu płaszczyznach, zaczynając od tego samego punktu.
Wektory współliniowe nie spotykają się w punkcie, jak wektory współbieżne, ponieważ są do siebie równoległe.
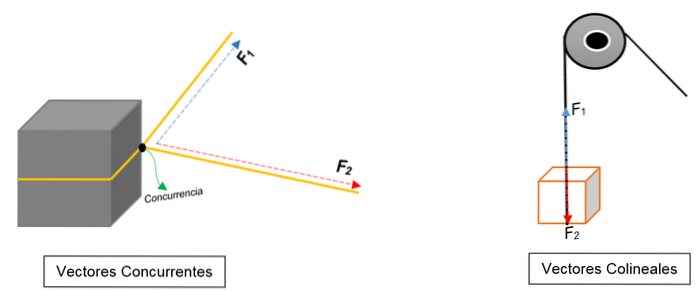
Na lewym obrazku widać blok. Jest zawiązany sznurem i węzeł dzieli go na dwie części; gdy jest ciągnięty w różnych kierunkach iz różnymi siłami, klocek przesunie się w tym samym kierunku.
Reprezentowane są dwa wektory, które są zbieżne w punkcie (bloku), niezależnie od ich modułu, kierunku czy kierunku.
Z drugiej strony na prawym obrazku znajduje się koło pasowe, które unosi pudełko. Lina reprezentuje linię działania; gdy jest ciągnięty, działają na niego dwie siły (wektory): siła rozciągająca (gdy klocek jest podniesiony) i druga siła, która wywiera ciężar klocka. Obie mają ten sam kierunek, ale w przeciwnych kierunkach; w pewnym momencie nie zgadzają się.


Jeszcze bez komentarzy