ZA wektor w przestrzeni to każdy reprezentowany przez układ współrzędnych podany przez x, Y Y z. Prawie zawsze samolot xy jest płaszczyzną poziomej powierzchni i osi z reprezentuje wysokość (lub głębokość).
Osie współrzędnych kartezjańskich pokazane na rysunku 1 dzielą przestrzeń na 8 obszarów zwanych oktanty, analogicznie jak osie x - Y podziel samolot na 4 ćwiartki. Będziemy wtedy mieć 1 oktant, 2 oktant i tak dalej.
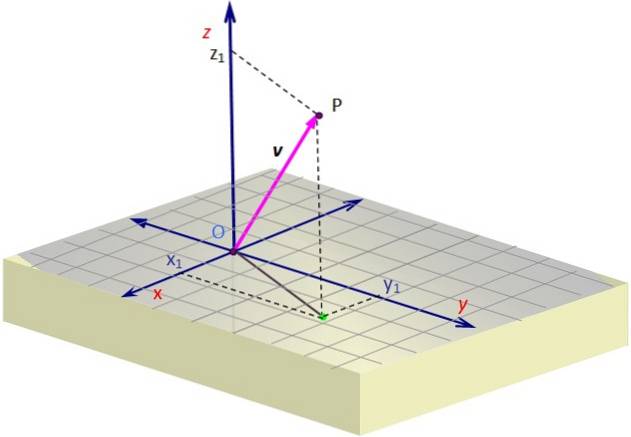
Rysunek 1 zawiera reprezentację wektora v w kosmosie. Potrzebna jest pewna perspektywa, aby stworzyć iluzję trzech wymiarów na płaszczyźnie ekranu, co osiąga się, rysując ukośny widok.
Aby wykreślić wektor 3D, użyj kropkowanych linii, które określają na siatce współrzędne odwzorowania lub „cienia” v Po powierzchni x-y. Ta projekcja zaczyna się w O i kończy w zielonym punkcie.
Tam musisz kontynuować wzdłuż pionu do wymaganej wysokości (lub głębokości) zgodnie z wartością z, aż do osiągnięcia P. Wektor jest rysowany zaczynając od O i kończąc na P, co w przykładzie znajduje się w 1. oktancie.
Indeks artykułów
Wektory w kosmosie są szeroko stosowane w mechanice i innych gałęziach fizyki i inżynierii, ponieważ otaczające nas struktury wymagają trójwymiarowej geometrii..
Wektory położenia w przestrzeni służą do pozycjonowania obiektów względem punktu odniesienia o nazwie źródło O. Dlatego są też niezbędnymi narzędziami w nawigacji, ale to nie wszystko.
Siły działające na konstrukcje, takie jak śruby, wsporniki, kable, rozpórki i inne, mają charakter wektorowy i są zorientowane w przestrzeni. Aby poznać jego działanie, należy znać jego adres (a także miejsce zastosowania).
Często kierunek działania siły jest znany ze znajomości dwóch punktów w przestrzeni, które należą do linii jej działania. W ten sposób siła jest:
fa = F. lub
Gdzie F jest wielkością lub modułem siły i lub jest wektorem jednostkowym (modułu 1) skierowanym wzdłuż linii działania fa.
Zanim przejdziemy do rozwiązania niektórych przykładów, krótko omówimy notację wektorów 3D.
W przykładzie na rysunku 1 wektor v, którego punkt początkowy pokrywa się z punktem początkowym O i którego końcem jest punkt P, ma współrzędne x Y z dodatnia, natomiast współrzędna Y jest negatywna. Te współrzędne to: x1, Y1, z1, które są dokładnie współrzędnymi P..
Jeśli więc mamy wektor powiązany z punktem początkowym, to znaczy którego punkt początkowy pokrywa się z O, bardzo łatwo jest wskazać jego współrzędne, które będą odpowiadały punktowi skrajnemu lub P. Aby odróżnić punkt od wektora, użyjemy do ostatnich pogrubionych liter i nawiasów, w ten sposób:
v = < x1, Y1, z1 >
Podczas gdy punkt P jest oznaczony nawiasami:
P = (x1, Y1, z1)
Inna reprezentacja wykorzystuje wektory jednostkowe ja, jot Y k które definiują trzy kierunki przestrzeni na osiach x, Y Y z odpowiednio.
Te wektory są do siebie prostopadłe i tworzą podstawa ortonormalna (patrz rysunek 2). Oznacza to, że wektor 3D można zapisać w ich kategoriach jako:
v = wx ja + vY jot + vz k
Rysunek 2 pokazuje również kąty reżysera γ1, γdwa i γ3 niż wektor v robi odpowiednio z osiami x, Y Y z. Znając te kąty i wielkość wektora, jest to całkowicie określone. Ponadto cosinusy kątów reżyserskich spełniają następującą zależność:
(cos γ1)dwa + (cos γdwa)dwa + (cos γ3)dwa = 1
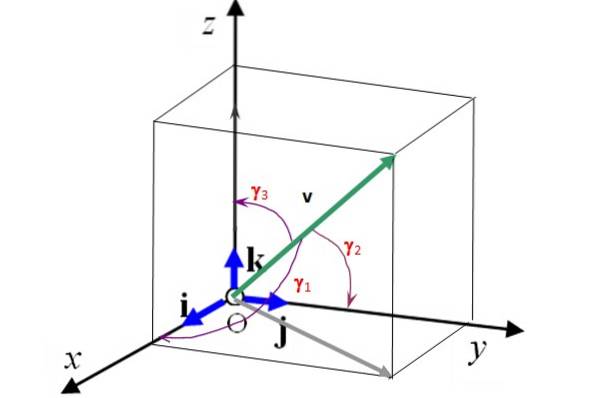
Na rysunku 2 kąty γ1, γdwa i γ3 niż wektor v o kształcie modułu 50 z osiami współrzędnych wynoszą odpowiednio: 75,0º, 60,0º i 34,3º. Znajdź składowe kartezjańskie tego wektora i przedstaw go za pomocą wektorów jednostkowych ja, jot Y k.
Projekcja wektorowa v na osi x jest Vx = 50. cos 75º = 12 941. Podobnie projekcja v na osi Y jest VY = 50 cos 60 º = 25 i ostatecznie na osi z jest Vz = 50. cos 34,3º = 41,3. Teraz v można wyrazić jako:
v = 12,9 ja + 25,0 jot + 41.3 k
Znajdź naprężenia w każdym z linek, które utrzymują wiadro na rysunku będącym w równowadze, jeśli jego waga wynosi 30 N.
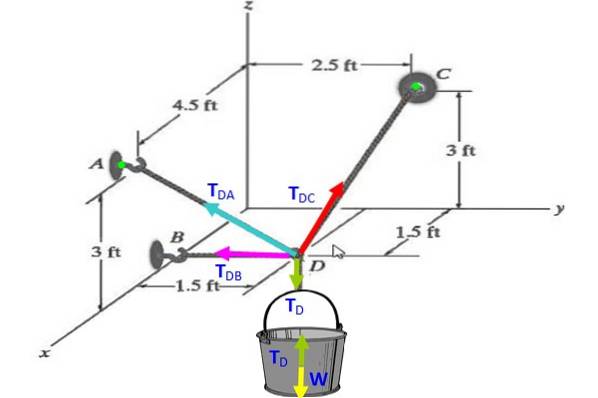
Wskazuje na to diagram swobodnego ciała na wiadrze Tre (zielony) wyrównuje wagę W (żółty), dlatego Tre = W = 30 N..
W węźle wektor Tre skierowana jest pionowo w dół, to:
Tre = 30 (-k) N.
Aby ustalić pozostałe napięcia, wykonaj następujące kroki:
A = (4.5,0,3) (A jest na płaszczyźnie ściany x-z)
B = (1.5,0,0) (B jest na osi x)
C = (0, 2,5, 3) (C jest na płaszczyźnie ściany i Z)
D = (1,5, 1,5, 0) (D jest na płaszczyźnie poziomej x-y)
DAJE = <3; -1.5; 3>
DC = <-1.5; 1; 3>
DB = <0; -1.5 ; 0>
Wektor jednostkowy uzyskuje się za pomocą wyrażenia: lub = r / r, z r (pogrubioną czcionką) jest wektorem, a r (nie jest pogrubioną czcionką) jest modułem wspomnianego wektora.
DA = (3dwa + (-1,5)dwa + 3dwa)½ = 4,5; DC = ((-1,5) dwa + 1dwa + 3dwa)½ = 3,5
lubDAJE = <3; -1.5; 3>4,5 = <0.67 ; -0.33 ; 0.67>
lubDC = <-1.5; 1; 3>3,5 = <-0.43; 0.29; 0.86>
lubDB = <0; -1; 0>
lubre = <0; 0; -1>
TDAJE = TDAJE lubDAJE = TDAJE<0.67 ; -0.33 ; 0.67>
TDC = TDC lubDC = TDC <-0.43; 0.29; 0.86>
TDB = TDB lubDB = TDB <0; -1; 0>
Tre = 30 <0; 0; -1>
Na koniec do wiadra stosuje się warunek równowagi statycznej, tak aby suma wektorów wszystkich sił na węźle wynosiła zero:
TDAJE + TDC + TDB + Tre = 0
Ponieważ naprężenia występują w przestrzeni, spowoduje to układ trzech równań dla każdego składnika (x, i i z) napięć.
0,67 TDAJE -0,43 TDC + 0 TDB = 0
-0,33 TDAJE + 0,29 TDC - TDB = 0
0,67 TDAJE + 0,86 TDC +0 TDB - 30 = 0
Rozwiązanie brzmi: TDAJE = 14,9 N; TDAJE = 23,3 N; TDB = 1,82 N



Jeszcze bez komentarzy