
Stwierdzono, że jest w nim wydłużony korpus równowaga obrotowa gdy suma działających na nią momentów obrotowych wynosi zero. Nie oznacza to, że obiekt jest koniecznie w spoczynku, ale raczej, że nie ma tendencji do zmiany stanu ruchu na inny..
Obiekt, który porusza się ze stałą prędkością, porusza się po linii prostej i możemy go rozpatrywać w równowadze obrotowej. Teraz obiekty obracają się, ponieważ działają na nie siły w taki sposób, że następuje obrót. Zdolność siły do wytworzenia obrotu, zwana momentem obrotowym lub torca, zależy nie tylko od intensywności siły, ale także od miejsca jej przyłożenia.

Rozpoznajemy to natychmiast, gdy zamknięte drzwi mają zostać otwarte: siła nigdy nie jest przyłożona w pobliżu zawiasów, ale z dala od nich, dlatego klamka jest umieszczona jak najdalej, po przeciwnej stronie drzwi.
Oś obrotu drzwi przechodzi przez zawiasy. Nalegając na dociśnięcie go bardzo blisko zawiasów, trzeba wiele wysiłku, aby drzwi się choć trochę poruszyły..
W literaturze moment obrotowy występuje pod różnymi nazwami: moment obrotowy, skręcanie, moment siły i moment obrotowy. Wszystkie są synonimami.
Musimy więc znać momenty działające na obiekt, aby ustalić warunek równowagi rotacyjnej.
Indeks artykułów
Warunek równowagi rotacyjnej to:
Suma wszystkich momentów lub momentów działających na ciało, obliczona w odniesieniu do dowolnej osi, musi wynosić zero.
Przedmiotowy przedmiot musi zostać rozciągnięty, ponieważ cząstki z definicji mają tylko równowagę translacyjną.
Mogą istnieć siły przyłożone do ciała i nadal istnieć równowaga obrotowa, o ile siły nie wprawią go w obrót.
Może również wystąpić ruch, nawet przyspieszony, ale zawsze po linii prostej, ponieważ nie wszystkie siły powodują pojawienie się momentów obrotowych. Pojawiają się, gdy siły nie działają zgodnie z tym samym kierunkiem działania..
Moment obrotowy jest oznaczony grecką literą τ, na pogrubiona czcionka ponieważ jest wektorem i dlatego odróżniamy go od jego wielkości lub modułu, który jest skalarem. Zależy to od przyłożonej siły fa, wektor r która jest skierowana od osi obrotu O do punktu przyłożenia siły i ostatecznie od kąta między tymi dwoma wektorami.
Produkt wektorowy ustanawia odpowiednią zależność między tymi ilościami:
τ = r x fa
A moduł momentu obrotowego, oznaczony bez pogrubienia, to:
τ = r⋅F⋅sen θ
Gdzie θ jest kątem między r Y fa. Jednostki momentu obrotowego to po prostu N⋅m w systemie międzynarodowym.
Na rysunku znajduje się klucz, za pomocą którego należy obrócić nakrętkę przeciwnie do ruchu wskazówek zegara (przeciwnie do ruchu wskazówek zegara). W tym celu jest testowany dwoma siłami faDO Y fab.
faDO jest bliżej O i ma wektor rDO lub krótsze ramię dźwigni, dlatego nie wytwarza tak dużego momentu obrotowego, jak siła fab, który ma równą wielkość, ale ma wektor rb większy.
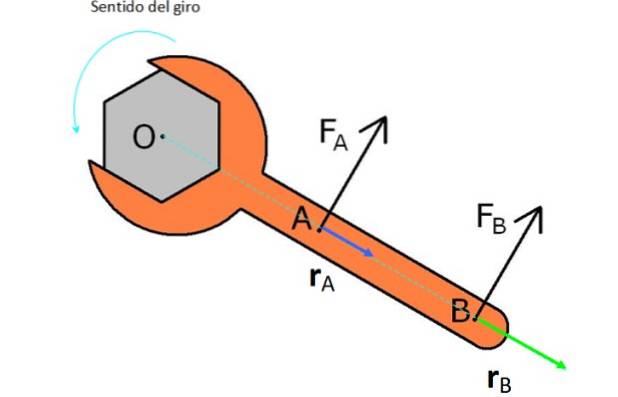
Zwróć uwagę, że jeśli chcesz obrócić nakrętkę w kierunku zgodnym z ruchem wskazówek zegara, musisz przyłożyć siły w przeciwnym kierunku, jak pokazano na rysunku.
Ponieważ moment obrotowy wynika z iloczynu poprzecznego między wektorami siły i położenia, a te znajdują się w płaszczyźnie klucza, moment obrotowy musi być wektorem prostopadłym do tej płaszczyzny, to znaczy skierowanym w stronę czytelnika lub do wnętrza strona.
Zgodnie z konwencją, moment obrotowy jest dodatni, jeśli obraca się w kierunku przeciwnym do ruchu wskazówek zegara, a ujemny, jeśli obraca się zgodnie z ruchem wskazówek zegara..
Kierunek i zwrot uzyskanego momentu obrotowego można łatwo określić za pomocą reguły prawej ręki pokazanej poniżej:
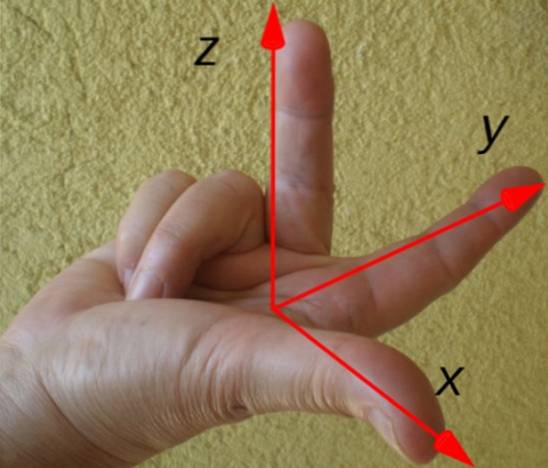
Palec wskazujący wskazuje zgodnie z wektorem pozycji r, środkowy palec według siły fa a kciuk wskazuje kierunek i poczucie momentu obrotowego τ. W tym przykładzie moment obrotowy jest kierowany wzdłuż osi X, zgodnie z rysunkiem osi współrzędnych.
Jeśli momenty działają na ciało τ1, τdwa, τ3… τja, moment obrotowy netto lub wynikowy τn jest sumą wektorów wszystkich z nich:
τn = τ1+ τdwa + τ3 +... τja
Z notacją sumującą pozostaje:
τn = ∑ τja
Warunek równowagi wyraża się matematycznie w następujący sposób:
τn = 0
No cóż:
∑ τja = 0
Gdzie moment obrotowy τ, w odniesieniu do określonej osi O oblicza się ją ze wzoru:
τ = r x fa
A którego wielkość wynosi:
τ = r⋅F⋅sen θ
-U ludzi i zwierząt ciężar jest siłą, która może wywołać moment obrotowy, wirowanie i upadek.
Ludzie na ogół utrzymują taką postawę, że podczas chodzenia utrzymują równowagę rotacyjną, chyba że uprawiają sporty, takie jak gimnastyka, jazda na łyżwach lub inne sporty..
-Dwóch chłopców, którym udało się utrzymać poziomo w biegun lub w górę i w dół są w równowadze rotacyjnej.
-Kiedy szalki wagi są zrównoważone, system jest w równowadze obrotowej.
-Znaki i sygnalizacja świetlna wiszące na ulicach i alejach również znajdują się w równowadze obrotowej. Jeśli kable, które je trzymają, pękną, równowaga zostanie utracona, a znak wisi lub spada..
-Mosty wiszące, takie jak Golden Gate w San Francisco i most na rysunku 1.
Belka nośna pokazana na rysunku jest bardzo lekka. Siła wywierana przez podporę wynosi fa i przy skrajnie prawej stronie przykładana jest siła DO.
Wymagane jest obliczenie wielkości tych sił, biorąc pod uwagę, że układ jest w równowadze translacyjnej i obrotowej.

Ponieważ system się nie porusza, sumowanie sił jest anulowane. Wszystkie są pionowe i można je obrabiać z wielkościami. Kierunek dodatni jest do góry, a kierunek ujemny do dołu, dlatego:
F - 80 - A = 0
Teraz stosowany jest warunek równowagi obrotowej, dla którego musimy wybrać dowolną oś obrotu. W tym przypadku jest wybierany skrajnie po prawej stronie, tak aby wektor rDO jest zerowy, w ten sposób wywierany przez moment obrotowy DO, ale tylko te z fa i siła lewicy.
Moment obrotowy wytwarzany przez fa to zgodnie z regułą prawej ręki i przedstawionym układem współrzędnych:
τfa = rfa x fa = 0,9 F (-k) N.m
Jest skierowany do wnętrza ekranu i ma znak ujemny. Podczas gdy moment obrotowy wytwarzany przez siłę 80 N wynosi:
τ = 80 x 1,20 (k) N⋅m = 96 (k) N⋅m
Ten moment obrotowy jest kierowany z dala od ekranu i ma przypisany znak dodatni. Jak istnieje równowaga rotacyjna:
96 - 0,9⋅F = 0
Wielkość fa to jest:
F = (96 / 0,9) N = 106,7 N
A ponieważ system jest w równowadze translacyjnej, suma sił jest anulowana. To pozwala nam obliczyć wielkość DO:
F - A - 80 N = 0
W związku z tym:
A = 106,7 - 80 N = 26,7 N.



Jeszcze bez komentarzy