
Plik zasada prawej ręki jest zasobem mnemonicznym do ustalenia kierunku i sensu wektora wynikającego z iloczynu wektorowego lub iloczynu krzyżowego. Jest szeroko stosowany w fizyce, ponieważ istnieją ważne wielkości wektorowe, które są wynikiem iloczynu wektorowego. Tak jest na przykład w przypadku momentu obrotowego, siły magnetycznej, pędu kątowego i momentu magnetycznego.
Niech będą dwoma wektorami rodzajowymi do Y b którego iloczynem jest do x b. Moduł takiego wektora to:
do x b = a.b. w wersji α
Gdzie α jest minimalnym kątem między do Y b, podczas gdy a i b reprezentują jego moduły. Aby rozróżnić wektory ich modułów, stosuje się pogrubione litery.
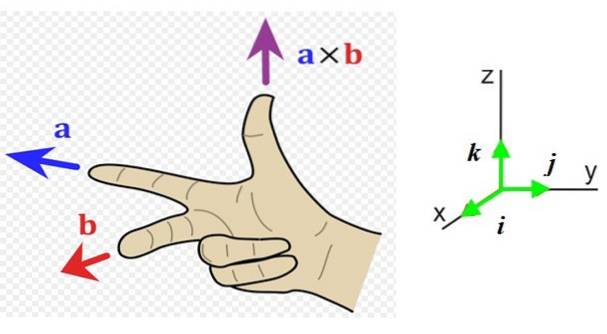
Teraz musimy znać kierunek i zwrot tego wektora, więc wygodnie jest mieć układ odniesienia z trzema kierunkami przestrzeni (rysunek 1 po prawej). Wektory jednostkowe ja, jot Y k wskazują odpowiednio na czytelnika (poza stroną), w prawo i do góry.
W przykładzie na rysunku 1 po lewej stronie wektor do kieruje się w lewo (kierunek Y ujemny i wskazujący palec prawej ręki) oraz wektor b idzie do czytelnika (kierunek x pozytywny, środkowy palec prawej ręki).
Wynikowy wektor do x b ma kierunek kciuka, w górę w kierunku z pozytywny.
Indeks artykułów
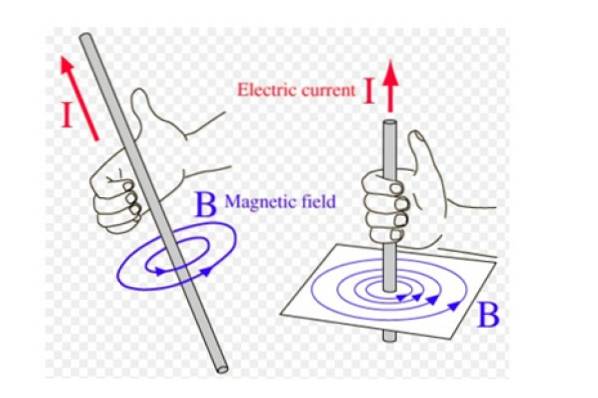
Ta zasada, zwana także reguła prawego kciuka, Jest często używany, gdy istnieją wielkości, których kierunek i kierunek się obracają, takie jak pole magnetyczne b wytwarzane przez cienki, prosty drut, który przewodzi prąd.
W tym przypadku linie pola magnetycznego są współśrodkowymi okręgami z drutem, a kierunek obrotu uzyskuje się za pomocą tej reguły w następujący sposób: prawy kciuk wskazuje kierunek prądu, a pozostałe cztery palce są zakrzywione w kierunku wieś. Koncepcję ilustrujemy na rysunku 2.
Poniższy rysunek przedstawia alternatywną formę reguły prawej ręki. Wektory, które pojawiają się na ilustracji, to:
-Prędkość v opłaty punktowej q.
-Pole magnetyczne b w którym porusza się ładunek.
-fab siła, jaką pole magnetyczne wywiera na ładunek.
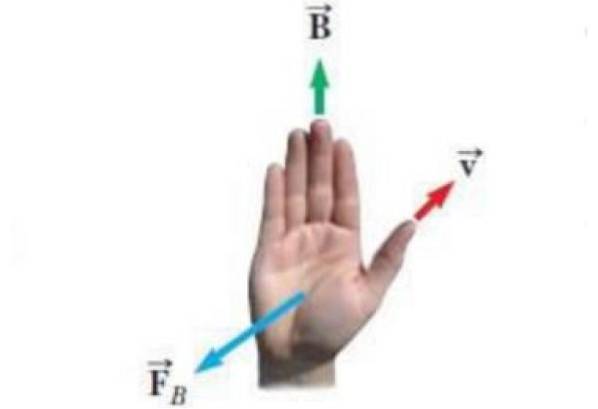
Równanie siły magnetycznej to fab = qv x b i reguły prawej ręki, aby poznać kierunek i sens fab stosuje się w następujący sposób: punkty kciukowe zgodnie z v, cztery pozostałe palce są umieszczane zgodnie z polem B. Następnie fab jest wektorem wychodzącym z dłoni prostopadle do niej, jakby popychał ładunek.
Zwróć na to uwagę fab Wskazałbym w przeciwnym kierunku jeśli ładunek q był ujemny, ponieważ iloczyn wektorowy nie jest przemienny. W rzeczywistości:
do x b = - b x do
Regułę prawej ręki można zastosować do różnych wielkości fizycznych, poznajmy niektóre z nich:
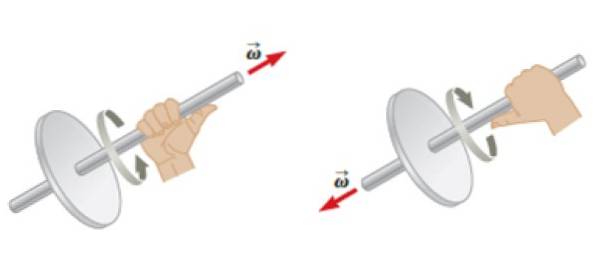
Obie prędkości kątowe ω jako przyspieszenie kątowe α są wektorami. Jeśli obiekt obraca się wokół ustalonej osi, można przypisać kierunek i zwrot tych wektorów za pomocą reguły prawej ręki: cztery palce są zwinięte zgodnie z obrotem, a kciuk natychmiast oferuje kierunek i poczucie prędkości kątowej ω.
Ze swojej strony przyspieszenie kątowe α będzie mieć ten sam adres co ω, ale jego znaczenie zależy od tego, czy ω rośnie lub maleje w czasie. W pierwszym przypadku oba mają ten sam kierunek i zwrot, ale w drugim będą miały przeciwne kierunki..
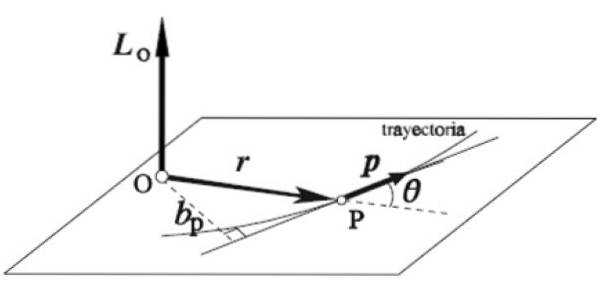
Wektor momentu pędu LLUB cząstki, która obraca się wokół określonej osi O, jest definiowana jako iloczyn wektorowy jej chwilowego wektora położenia r i pęd liniowy p:
L = r x p
Reguła prawej ręki jest stosowana w ten sposób: palec wskazujący jest skierowany w tym samym kierunku i zwrocie r, środkowy palec na tym z p, oba w płaszczyźnie poziomej, jak na rysunku. Kciuk jest automatycznie wyciągany pionowo w górę, wskazując kierunek i poczucie momentu pędu LLUB.
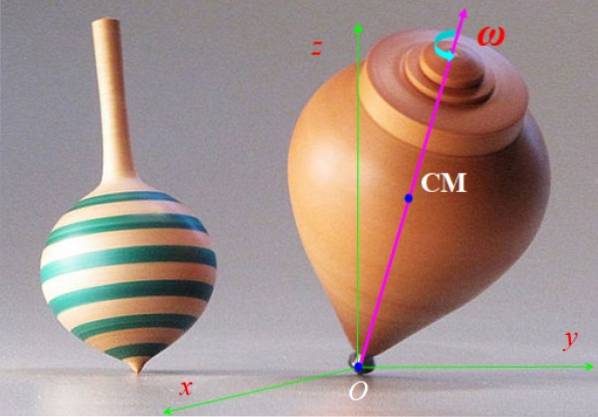
Wierzchołek na rysunku 6 obraca się szybko z prędkością kątową ω a jego oś symetrii obraca się wolniej wokół osi pionowej z. Ten ruch nazywa się precesja. Opisz siły działające na bączek i efekt, jaki wywołują.
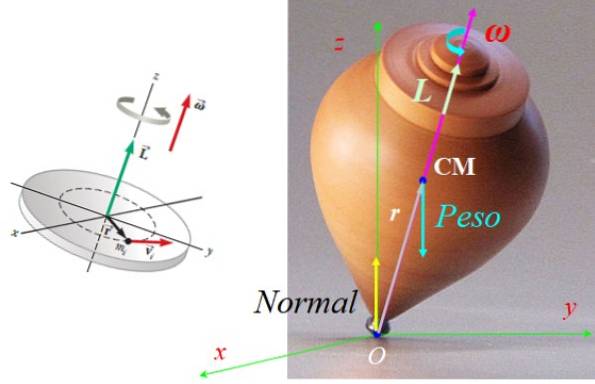
Siły działające na górę są normalne N, przyłożony do punktu podparcia z podłożem O plus ciężarek Msol, zastosowany w środku ciężkości CM, z sol wektor przyspieszenia ziemskiego skierowany pionowo w dół (patrz rysunek 7).
Obie siły się równoważą, dlatego blat się nie porusza. Jednak waga wytwarza moment obrotowy lub moment obrotowy τ netto w odniesieniu do punktu O, określony przez:
τLUB = rLUB x fa, z F = Msol.
Co r oraz msol są one zawsze w tej samej płaszczyźnie, w której obraca się góra, zgodnie z regułą prawej ręki określającą moment obrotowy τLUB zawsze znajduje się w samolocie xy, prostopadle do obu r Co sol.
Zwróć na to uwagę N nie wytwarza momentu obrotowego względem O, ponieważ jego wektor r w odniesieniu do O jest zerowe. Ten moment obrotowy powoduje zmianę momentu pędu, która powoduje, że góra wyprzedza się wokół osi Z..
Wskaż kierunek i zwrot wektora momentu pędu L górnej części rysunku 6.
Dowolny punkt na górze ma masę mja, prędkość vja i wektor pozycji rja, kiedy obraca się wokół osi z. Moment pędu Lja wspomnianej cząstki to:
Lja = rja x pja = rja x mjavja
Biorąc pod uwagę rja Y vja są prostopadłe, wielkość L to jest:
Lja = mjarjavja
Prędkość liniowa v jest związana z prędkością kątową ω przez:
vja = rjaω
W związku z tym:
Lja = mjarja (rjaω) = mjarjadwaω
Całkowity moment pędu wirującego bąka L jest sumą pędu każdej cząstki:
L = (∑mjarjadwa ) ω
∑ mjarjadwa jest moment bezwładności I góry, to:
L= Jaω
W związku z tym L Y ω mają ten sam kierunek i zwrot, jak pokazano na rysunku 7.



Jeszcze bez komentarzy