
Twierdzenie Varignona w mechanice stwierdza, że suma momentów wytworzonych przez układ sił współbieżnych względem pewnego punktu jest równa momentowi siły wypadkowej względem tego samego punktu.
Z tego powodu twierdzenie to jest również znane jako początek chwil.
Chociaż pierwszym, który go wypowiedział, był Holender Simon Stevin (1548-1620), twórca paradoksu hydrostatycznego, francuski matematyk Pierre Varignon (1654-1722) był tym, który później nadał mu ostateczną formę.
Przykład działania twierdzenia Varignona w mechanice jest następujący: załóżmy, że w punkcie działa prosty układ dwóch współpłaszczyznowych i współbieżnych sił fa1 Y fadwa, (oznaczone pogrubioną czcionką ze względu na ich charakter wektorowy). Siły te powodują powstanie siły wypadkowej lub wypadkowej, zwanej faR.
Każda siła wywiera moment obrotowy lub moment wokół punktu O, który jest obliczany przez iloczyn wektorowy między wektorem położenia rOP i siłę fa, gdzie rOP jest skierowany od O do punktu współbieżności P:
MO1 = rOP × fa1
MO2 = rOP × fadwa
Biorąc pod uwagę faR = fa1 + fadwa, następnie:
MLUB = rOP × fa1 + rOP × fadwa = MO1 + MO2
Ale jak rOP jest więc wspólnym czynnikiem, stosującym właściwość dystrybucyjną do iloczynu krzyżowego:
MLUB = rOP × (fa1 + fadwa) = rOP × faR
Dlatego suma momentów lub momentów każdej siły względem punktu O jest równoważna momentowi siły wypadkowej względem tego samego punktu.
Niech będzie układ N współbieżnych sił, utworzony przez fa1, fadwa, fa3... faN, których linie działania przecinają się w punkcie P (patrz rysunek 1), moment tego układu sił MLUB, w odniesieniu do punktu O dana jest wzorem:
MLUB = rOP × fa1 + rOP × fadwa + rOP × fa3 +... rOP × faN = rOP × (fa1 + fadwa + fa3 +... faN)
Aby udowodnić twierdzenie, wykorzystuje się właściwość dystrybucyjną produktu wektorowego między wektorami.
Bądź siłami fa1, fadwa, fa3... faN zastosowane do punktów A1, DOdwa, DO3… DON i współbieżny w punkcie P. Wynikowy moment tego układu, w odniesieniu do punktu O, zwany MLUB, jest sumą momentów każdej siły w odniesieniu do wspomnianego punktu:
MLUB = ∑ rOAi × faja
Gdzie suma przechodzi od i = 1 do i = N, ponieważ istnieje N sił. Ponieważ mamy do czynienia z siłami współbieżnymi i ponieważ iloczyn wektorowy między równoległymi wektorami wynosi zero, zdarza się, że:
rPAi × faja = 0
Z wektorem zerowym oznaczonym jako 0.
Moment jednej z sił względem O, na przykład moment siły faja zastosowany w Aja, jest napisane tak:
Msłyszałem = rOAi × faja
Wektor pozycji rOAi można wyrazić jako sumę dwóch wektorów pozycji:
rOAi = rOP + rPAi
W ten sposób moment około O siły faja to jest:
Msłyszałem = (rOP + rPAi) × faja = (rOP × faja) + (rPAi × faja)
Ale ostatni termin jest zerowy, jak wyjaśniono powyżej, ponieważ rPAi jest na linii działania faja, A zatem:
Msłyszałem = rOP × faja
Wiedząc, że moment układu względem punktu O jest sumą wszystkich poszczególnych momentów każdej siły względem tego punktu, to:
MLUB = ∑ Msłyszałem = ∑ rOP × faja
Co rOP jest stała wynika z sumy:
MLUB = rOP × (∑ faja)
Ale ∑ faja jest po prostu siłą wypadkową lub wypadkową faR, dlatego natychmiast stwierdza się, że:
MLUB = rOP × faR
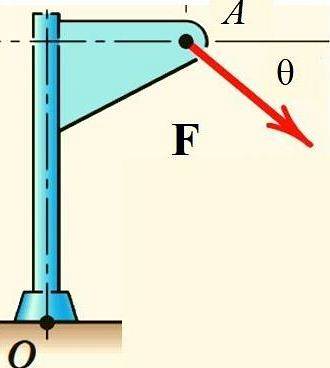
Twierdzenie Varignona ułatwia obliczenie momentu siły fa W odniesieniu do punktu O w konstrukcji przedstawionej na rysunku, jeżeli siła rozkłada się na jej prostokątne składowe i oblicza się moment każdej z nich:
Gdy znana jest wypadkowa siła układu, można zastosować twierdzenie Varignona, aby zastąpić sumę każdego z momentów sił, które go tworzą, momentem wypadkowej.
Jeżeli układ składa się z sił działających na tej samej płaszczyźnie, a punkt, względem którego ma być obliczany moment, należy do tej płaszczyzny, to wynikowy moment jest prostopadły.
Na przykład, jeśli wszystkie siły są w płaszczyźnie xy, moment jest skierowany w osi z i pozostaje tylko znaleźć jego wielkość i zwrot, tak jest w przypadku opisanego powyżej przykładu.
W tym przypadku twierdzenie Varignona pozwala nam obliczyć wynikowy moment układu poprzez sumowanie. Jest to bardzo przydatne w przypadku trójwymiarowego układu sił, dla którego kierunek powstałego momentu nie jest znany a priori.
Aby rozwiązać te ćwiczenia, wygodnie jest rozłożyć siły i wektory położenia na ich prostokątne składowe, a na podstawie sumy momentów określić składowe momentu netto.
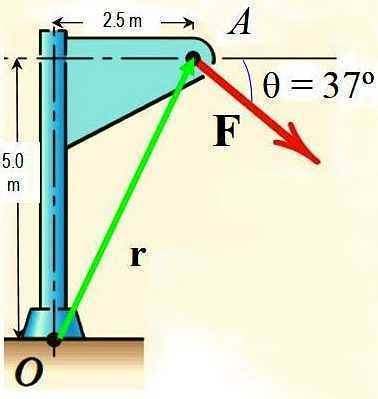
Korzystając z twierdzenia Varignona, obliczyć moment siły F wokół punktu O pokazanego na rysunku, jeśli wartość F wynosi 725 N.
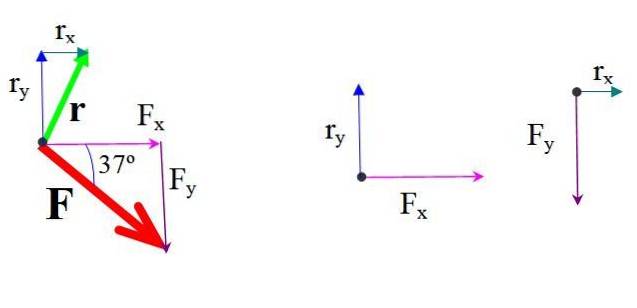
Aby zastosować twierdzenie Varignona, rozłóż siłę fa w dwóch składowych, których odpowiednie momenty wokół O są obliczane i dodawane w celu uzyskania momentu wynikowego.
fax = 725 N ∙ cos 37 º = 579,0 N
faY = - 725 N N ∙ sin 37 º = −436,3 N
Podobnie wektor pozycji r skierowany od O do A posiada komponenty:
rx = 2,5 m
rY = 5,0 m
Moment każdej składowej siły około O oblicza się, mnożąc siłę i odległość prostopadłą.
Obie siły mają tendencję do obracania konstrukcji w tym samym kierunku, który w tym przypadku jest zgodny z ruchem wskazówek zegara, do którego arbitralnie przypisywany jest znak dodatni:
MWół = F.x∙ rY ∙ sin 90º = 579,0 N ∙ 5,0 m = 2895 N ∙ m
MOy = F.Y∙ rx ∙ sin (−90º) = −436,3 N ∙ 2,5 m ∙ (−1) = 1090,8 N ∙ m
Wynikowy moment o O to:
MLUB = MWół + MOy = 3985,8 N ∙ m prostopadle do płaszczyzny i zgodnie z ruchem wskazówek zegara.


Jeszcze bez komentarzy