
Plik wektor Są to byty matematyczne, które mają -dodatnią- wielkość, której zazwyczaj towarzyszy jednostka miary, a także kierunek i zwrot. Takie cechy są bardzo odpowiednie do opisania wielkości fizycznych, takich jak prędkość, siła, przyspieszenie i wiele innych..
Za pomocą wektorów można wykonywać takie operacje, jak dodawanie, odejmowanie i iloczyn. Dzielenie nie jest zdefiniowane dla wektorów, a jeśli chodzi o iloczyn, istnieją trzy klasy, które opiszemy później: iloczyn skalarny lub punkt, iloczyn wektorowy lub krzyż i iloczyn skalara przez wektor.
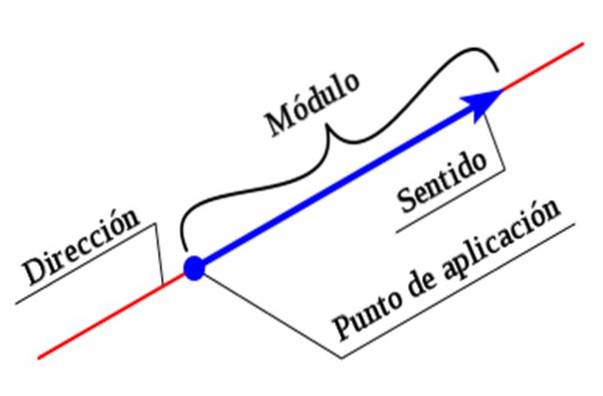
Aby w pełni opisać wektor, konieczne jest wskazanie wszystkich jego cech. Wielkość lub moduł to wartość liczbowa, której towarzyszy jednostka, podczas gdy kierunek i kierunek są ustalane za pomocą układu współrzędnych.
Spójrzmy na przykład: powiedzmy, że samolot leci z jednego miasta do drugiego z prędkością 850 km / hw kierunku północno-wschodnim. Tutaj mamy w pełni określony wektor, ponieważ wielkość jest dostępna: 850 km / h, podczas gdy kierunek i zwrot są w kierunku NE.
Wektory są zwykle przedstawiane graficznie za pomocą zorientowanych odcinków linii, których długość jest proporcjonalna do wielkości.
Podczas gdy do określenia kierunku i zwrotu wymagana jest linia odniesienia, która zwykle jest osią poziomą, chociaż północ może być również traktowana jako odniesienie, tak jest w przypadku prędkości samolotu:
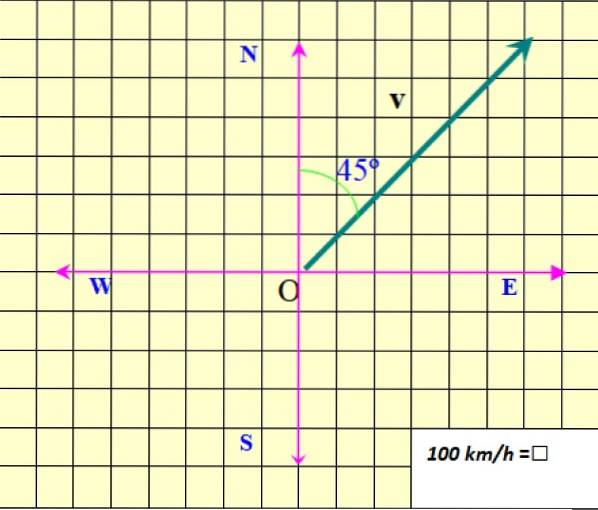
Rysunek przedstawia wektor prędkości samolotu oznaczony jako v na pogrubienie, aby odróżnić ją od wielkości skalarnej, która wymaga jedynie podania wartości liczbowej i określonej jednostki.
Indeks artykułów
Jak powiedzieliśmy, elementy wektora to:
-Wielkość lub moduł, czasami nazywane również wartością bezwzględną lub normą wektora.
-Kierunek
-Sens
W przykładzie na rysunku 2 module v To jest 850 km / h. Moduł jest oznaczony jako v bez pogrubienia lub jako |v|, gdzie słupki przedstawiają wartość bezwzględną.
Adres v jest określony w odniesieniu do północy. W tym przypadku jest to 45º na północ od wschodu (45º NE). Wreszcie czubek strzałki informuje o kierunku v.
W tym przykładzie początek wektora został narysowany zbiegającym się z początkiem układu współrzędnych O, jest to znane jako związany wektor. Z drugiej strony, jeśli pochodzenie wektora nie pokrywa się z pochodzeniem układu odniesienia, mówi się, że jest to wolny wektor.
Należy zauważyć, że aby w pełni określić wektor, należy zwrócić uwagę na te trzy elementy, w przeciwnym razie opis wektora byłby niekompletny.
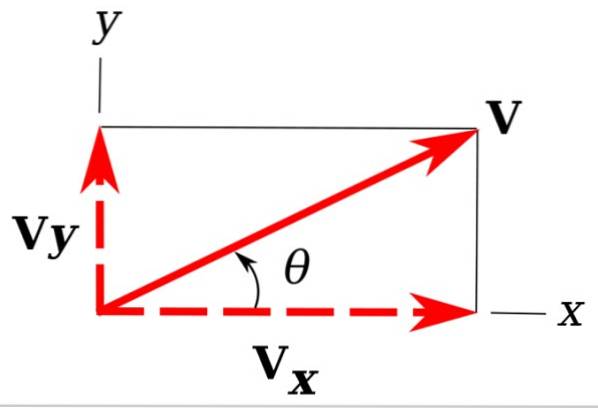
Na obrazku mamy nasz przykładowy wektor z powrotem v, to jest w samolocie xy.
Łatwo zauważyć, że rzuty v na osiach współrzędnych xiy wyznaczają trójkąt prostokątny. Te prognozy są vY Y vx i nazywane są prostokątnymi komponentami v.
Jeden sposób na oznaczenie v przez jego prostokątne komponenty wygląda tak: v =
Jeśli wektor znajduje się w przestrzeni trójwymiarowej, potrzebny jest jeszcze jeden komponent, aby:
v =
Znając składowe prostokątne, obliczana jest wielkość wektora, co jest równoważne znalezieniu przeciwprostokątnej trójkąta prostokątnego, którego nogi są vx Y vY,. Z twierdzenia Pitagorasa wynika, że:
|v|dwa = (wx)dwa + (wY)dwa
Kiedy znana jest wielkość wektora |v| i kąt θ, który tworzy z osią odniesienia, ogólnie osią poziomą, wektor jest również określony. Mówi się wtedy, że wektor jest wyrażony w postaci polarnej.
Prostokątne komponenty w tym przypadku można łatwo obliczyć:
vx = |v| .cos θ
vY = |v| .sen θ
Zgodnie z powyższym prostokątne składowe wektora prędkości v samolotu byłoby:
vx = 850. cos 45º km / h = 601,04 km / h
vY = 850. sin 45º km / h = 601,04 km / h
Istnieje kilka typów wektorów. Istnieją wektory prędkości, położenia, przemieszczenia, siły, pola elektrycznego, pędu i wiele innych. Jak już powiedzieliśmy, w fizyce istnieje duża liczba wielkości wektorowych.
Jeśli chodzi o wektory, które mają określone cechy, możemy wymienić następujące typy wektorów:
-Zero: są to wektory o wielkości równej 0 i oznaczone jako 0. Pamiętaj, że pogrubiona litera symbolizuje trzy podstawowe cechy wektora, podczas gdy normalna litera reprezentuje tylko moduł.
Na przykład na ciele w równowadze statycznej suma sił musi być wektorem zerowym.
-Wolny i związany: wektory swobodne to te, których punkt początkowy i punkt docelowy jest dowolną parą punktów w płaszczyźnie lub w przestrzeni, w przeciwieństwie do wektorów połączonych, których początek pokrywa się z pochodzeniem układu odniesienia użytego do ich opisu.
Para lub moment wytworzony przez parę sił jest dobrym przykładem wektora swobodnego, ponieważ para nie ma zastosowania do żadnego konkretnego punktu.
-Teamlenses: są to dwa wektory wolne, które mają identyczne cechy. Dlatego mają taką samą wielkość, kierunek i sens.
-Współpłaszczyznowe lub współpłaszczyznowe: wektory należące do tej samej płaszczyzny.
-Przeciwieństwa: wektory o równej wielkości i kierunku, ale przeciwnych kierunkach. Wektor przeciwny do wektora v jest wektorem -v a suma obu jest wektorem zerowym: v + (-v) = 0.
-Równoległy: wektory, których wszystkie linie akcji przechodzą przez ten sam punkt.
-Suwaki: to te wektory, których punkt aplikacji może przesuwać się wzdłuż określonej linii.
-Współliniowość: wektory, które znajdują się w tej samej linii.
-Jednolity: te wektory, których moduł wynosi 1.
W fizyce istnieje bardzo użyteczny typ wektora zwany ortogonalnym wektorem jednostkowym. Ortogonalny wektor jednostkowy ma moduł równy 1, a jednostkami mogą być dowolne, na przykład prędkość, położenie, siła lub inne.
Istnieje zestaw specjalnych wektorów, które pomagają łatwo reprezentować inne wektory i wykonywać na nich operacje: są to ortogonalne wektory jednostkowe ja, jot Y k, jednolite i prostopadłe do siebie.
W dwóch wymiarach wektory te są skierowane wzdłuż dodatniego kierunku obu osi x od osi Y. W trzech wymiarach wektor jednostkowy jest dodawany w kierunku osi z pozytywny. Są one przedstawiane w następujący sposób:
ja = <1, 0,0>
jot = < 0,1,0>
k = <0,0,1>
Wektor można przedstawić za pomocą wektorów jednostkowych ja, jot Y k następująco:
v = wx ja + vY jot + vz k
Na przykład wektor prędkości v z powyższych przykładów można zapisać jako:
v = 601,04 ja + 601.04 jot km / h
Komponent w k nie jest konieczne, ponieważ ten wektor znajduje się w płaszczyźnie.
Suma wektorów pojawia się bardzo często w różnych sytuacjach, na przykład gdy chcesz znaleźć wypadkową siłę na obiekcie, na który działają różne siły. Na początek załóżmy, że mamy dwa wektory swobodne lub Y v w samolocie, jak pokazano na poniższym rysunku po lewej stronie:
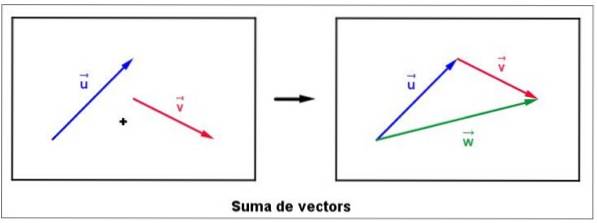
Jest natychmiast ostrożnie przenoszony do wektora v, bez modyfikowania jego wielkości, kierunku lub sensu, tak aby jego pochodzenie pokrywało się z końcem lub.
Wektor sumy nazywa się w i jest rysowany począwszy od u kończącego się na v, zgodnie z odpowiednim rysunkiem. Należy zauważyć, że wielkość wektora w niekoniecznie jest sumą wielkości v Y lub.
Jeśli dobrze się nad tym zastanowić, jedyny moment, w którym wielkość wynikowego wektora jest sumą wielkości addendów, jest wtedy, gdy oba addendy są w tym samym kierunku i mają ten sam sens..
A co się stanie, jeśli wektory nie będą wolne? Bardzo łatwo je też dodać. Sposobem na to jest dodanie komponentu do komponentu lub metoda analityczna.
Jako przykład rozważmy wektory na poniższym rysunku, pierwszą rzeczą jest wyrażenie ich na jeden z wcześniej wyjaśnionych sposobów kartezjańskich:
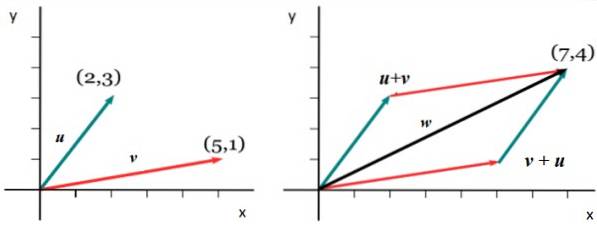
v = <5,1>
lub = <2,3>
Aby dostać komponent x wektora sumy w, odpowiednie składniki są dodawane x z v Y lub: wx = 5 + 2 = 7. I dostać wY postępuje analogiczna procedura: wY = 1 + 3. W związku z tym:
lub = <7,4>
-Suma dwóch lub więcej wektorów daje inny wektor.
-Jest przemienna, kolejność dodatków nie zmienia sumy w taki sposób, że:
lub + v = v + lub
-Neutralnym elementem sumy wektorów jest wektor zerowy: v + 0 = v
-Odejmowanie dwóch wektorów definiuje się jako sumę przeciwieństw: v - u = v + (-lub)
Jak powiedzieliśmy, w fizyce istnieje wiele wielkości wektorowych. Do najbardziej znanych należą:
-Pozycja
-Przemieszczenie
-Średnia prędkość i chwilowa prędkość
-Przyśpieszenie
-Siła
-Ilość ruchu
-Moment obrotowy lub moment siły
-Impuls
-pole elektryczne
-Pole magnetyczne
-Moment magnetyczny
Z drugiej strony nie są to wektory, ale skalary:
-Pogoda
-Masa
-Temperatura
-Tom
-Gęstość
-Praca mechaniczna
-Energia
-Gorąco
-Moc
-Napięcie
-Prąd elektryczny
Oprócz dodawania i odejmowania wektorów istnieją trzy inne bardzo ważne operacje między wektorami, ponieważ dają początek nowym bardzo ważnym wielkościom fizycznym:
-Iloczyn skalara i wektora.
-Iloczyn skalarny lub iloczyn skalarny między wektorami
-I iloczyn krzyżowy lub wektorowy między dwoma wektorami.
Rozważmy drugie prawo Newtona, które mówi, że siła fa i przyspieszenie do są proporcjonalne. Stałą proporcjonalności jest masa m obiektu, a zatem:
fa = m.do
Masa jest skalarem; siła i przyspieszenie są wektorami. Ponieważ siłę uzyskuje się przez pomnożenie masy przez przyspieszenie, jest ona wynikiem iloczynu skalara i wektora.
Ten typ iloczynu zawsze skutkuje wektorem. Oto kolejny przykład: ilość ruchu. Być P. wektor pędu, v wektor prędkości i jak zawsze, m to masa:
P. = m.v
Na listę wielkości, które nie są wektorami, umieściliśmy pracę mechaniczną. Jednak praca w fizyce jest wynikiem operacji między wektorami zwanymi iloczynem skalarnym, iloczynem wewnętrznym lub iloczynem skalarnym..
Niech wektory będą v Y lub, iloczyn skalarny lub skalar między nimi definiuje się jako:
v∙lub = |v| ∙ |lub | .cos θ
Gdzie θ to kąt między nimi. Z przedstawionego równania wynika natychmiast, że wynikiem iloczynu skalarnego jest skalar, a także, że jeśli oba wektory są prostopadłe, ich iloczyn skalarny wynosi 0.
Powrót do pracy mechanicznej W, jest to iloczyn skalarny między wektorem siły fa i wektor przemieszczenia ℓ.
W = fa∙ℓ
Gdy wektory są dostępne pod względem ich składowych, iloczyn skalarny jest również bardzo łatwy do obliczenia. tak v =
v∙lub = vx lubx + vY lubY + vz lubz
Iloczyn skalarny między wektorami jest przemienny, dlatego:
v∙lub = lub∙v
tak v a u są naszymi dwoma przykładowymi wektorami, iloczyn wektorowy jest zdefiniowany jako:
v x lub = w
Wynika z tego natychmiast, że iloczyn poprzeczny daje wektor, którego moduł definiuje się jako:
|v x u | = | v | . | u |. sen θ
Gdzie θ jest kątem między wektorami.
Dlatego iloczyn krzyżowy nie jest przemienny v x u ≠ u x v. w rzeczywistości v x u = - (u x v).
Jeśli dwa przykładowe wektory są wyrażone za pomocą wektorów jednostkowych, obliczenie iloczynu wektorowego jest łatwiejsze:
v = wx ja + vY jot + vz k
lub = ux ja + lubY jot + lubz k
Iloczyn poprzeczny między identycznymi wektorami jednostkowymi wynosi zero, ponieważ kąt między nimi wynosi 0 °. Ale między różnymi wektorami jednostkowymi kąt między nimi wynosi 90º i sin 90º = 1.
Poniższy diagram pomaga znaleźć te produkty. W kierunku strzałki ma kierunek dodatni, aw przeciwnym kierunku ma kierunek ujemny:
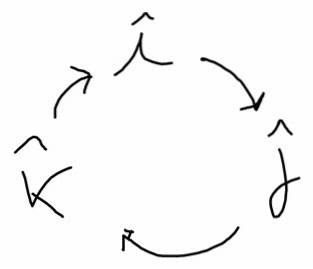
ja x jot = k, j x k = ja; k x ja = jot; jot x i = -k; k x jot = -ja; ja x k = -jot
Stosując właściwość rozdzielczą, która nadal obowiązuje dla iloczynów między wektorami plus właściwości wektorów jednostkowych, otrzymujemy:
v x lub = (wx ja + vY jot + vz k) x (ux ja + lubY jot + lubz k) =
= (wYlubz - vzlubY )ja + (wzlubx - vxlubz )jot + (wxlubY - vYlubx )k
Biorąc pod uwagę wektory:
v = -5 ja + 4jot + 1 k
lub = 2 ja -3 jot + 7k
Jaki powinien być wektor w tak, że suma v + lub + w wyszło na to, że 6 ja +8 jot -10k?
-5 ja + 4jot + 1 k
dwa ja -3 jot + 7k
wx ja + wY jot + wz k +
--
6ja + 8 jot -10 k
Dlatego należy spełnić, że:
-5 +2 + wx = 6 → szx = 9
4-3 + wY = 8 → szY = 7
1 + 7 + wz = -10 → wz = -18
Odpowiedź to: w = 9 ja +7 jot - 18k
Jaki jest kąt między wektorami v Y lub z ćwiczenia 1?
Użyjemy iloczynu skalarnego. Z definicji mamy:
cos θ = v∙lub / |v| ∙ |lub|
v∙lub= -10-12 + 7 = -15
|v| = √ (-5)dwa +4dwa +1dwa= √42 = 6,48
|lub| = √2dwa +(-3)dwa +7dwa= √62 = 7,87
Podstawiając te wartości:
cos θ = -15 / 6,48 x 7,87 = -0,2941 → θ = 107,1 º


Jeszcze bez komentarzy