Plik darmowe wektory Są to te, które są w pełni określone przez ich wielkość, kierunek i sens, bez konieczności wskazywania punktu zastosowania lub konkretnego pochodzenia.
Ponieważ w ten sposób można narysować nieskończone wektory, wektor swobodny nie jest pojedynczą jednostką, ale zbiorem równoległych i identycznych wektorów, które są niezależne od tego, gdzie się znajdują..
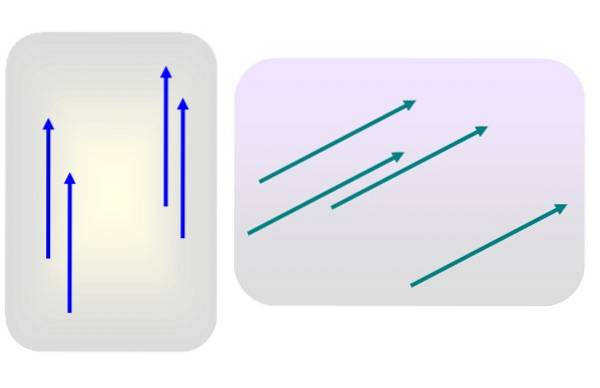
Powiedzmy, że mamy kilka wektorów o wielkości 3 skierowanych pionowo w górę lub o wielkości 5 i nachylonych w prawo, jak na rysunku 1.
Żaden z tych wektorów nie jest specjalnie stosowany w żadnym momencie. Wtedy każdy z niebieskich lub zielonych wektorów jest reprezentatywny dla ich odpowiedniej grupy, ponieważ ich cechy charakterystyczne - moduł, kierunek i sens - nie zmieniają się wcale, gdy są przenoszone w inne miejsce na płaszczyźnie..
Wolny wektor jest zwykle oznaczany w drukowanym tekście, na przykład małą, pogrubioną literą v. Lub z małymi literami i strzałką u góry, jeśli jest to tekst odręczny.
Indeks artykułów
Zaletą wektorów swobodnych jest to, że można je przesuwać w płaszczyźnie lub w przestrzeni i zachować swoje właściwości, ponieważ każdy przedstawiciel zbioru jest równie ważny.
Dlatego w fizyce i mechanice są często używane. Na przykład, aby wskazać prędkość liniową poruszającej się bryły, nie trzeba wybierać konkretnego punktu na obiekcie. Zatem wektor prędkości zachowuje się jak wektor swobodny.
Innym przykładem wektora swobodnego jest para sił. ZA para Składa się z dwóch sił o jednakowej wielkości i kierunku, ale o przeciwnych kierunkach, przyłożonych w różnych punktach na bryłę. Efektem pary nie jest przesunięcie obiektu, ale spowodowanie obrotu dzięki za chwilę wytworzony.
Rysunek 2 przedstawia kilka sił przyłożonych do kierownicy. Przez siły fa1 Y fadwa, powstaje moment obrotowy, który obraca koło zamachowe wokół jego środka i zgodnie z ruchem wskazówek zegara.
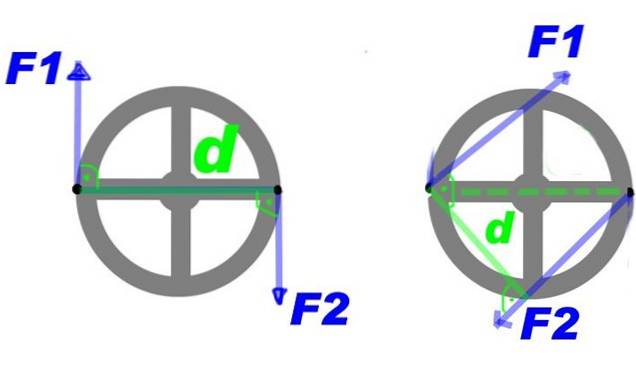
Możesz wprowadzić pewne zmiany w momencie obrotowym i nadal uzyskać ten sam efekt obracania, na przykład zwiększając siłę, ale zmniejszając odległość między nimi. Lub zachowaj siłę i odległość, ale zastosuj moment obrotowy w innej parze punktów na kierownicy, to znaczy obróć moment obrotowy wokół środka.
Moment pary sił lub po prostu para, jest wektorem, którego moduł jest Fd i jest skierowana prostopadle do płaszczyzny koła zamachowego. W przykładzie pokazanym konwencją obrót zgodnie z ruchem wskazówek zegara ma sens negatywny.
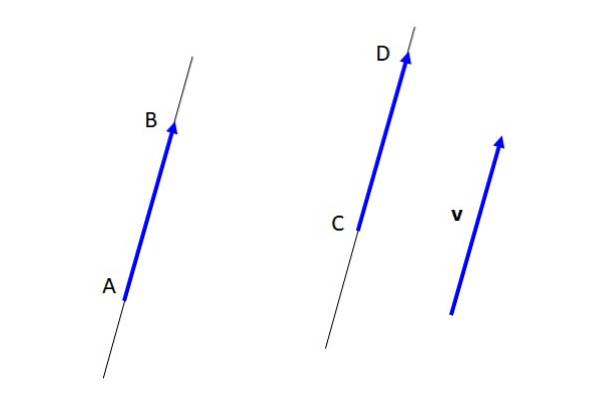
W przeciwieństwie do wektora swobodnego wektor wektory AB Y Płyta CD są one stałe (patrz rysunek 3), ponieważ mają określony punkt początkowy i punkt docelowy. Ale ponieważ są wyrozumiali dla siebie nawzajem, az kolei z wektorem v, są reprezentatywne dla wolnego wektora v.
Główne właściwości wektorów swobodnych są następujące:
-Dowolny wektor AB (patrz rysunek 2) jest, jak powiedziano, reprezentatywnym dla wektora swobodnego v.
-Moduł, kierunek i zwrot są takie same u każdego przedstawiciela wektora swobodnego. Na rysunku 2 wektory AB Y Płyta CD reprezentują wektor swobodny v i są zorientowani na pracę zespołową.
-Mając punkt P w przestrzeni, zawsze można znaleźć przedstawiciela wektora swobodnego v którego pochodzenie jest w P, a wspomniany przedstawiciel jest wyjątkowy. Jest to najważniejsza właściwość wektorów swobodnych i ta, która czyni je tak wszechstronnymi.
-Pusty wektor swobodny jest oznaczany jako 0 y jest zbiorem wszystkich wektorów, którym brakuje wielkości, kierunku i sensu.
-Jeśli wektor AB reprezentuje wektor swobodny v, następnie wektor BA reprezentuje wektor swobodny -v.
-Zostanie użyty zapis V3 wyznaczyć zbiór wszystkich wolnych wektorów przestrzeni i Vdwa aby wyznaczyć wszystkie wektory swobodne samolotu.
W przypadku wektorów swobodnych można wykonać następujące operacje:
-Suma
-Odejmowanie
-Mnożenie wartości skalarnej przez wektor
-Iloczyn skalarny między dwoma wektorami.
-Iloczyn poprzeczny między dwoma wektorami
-Liniowa kombinacja wektorów
I więcej.
Uczeń próbuje przepłynąć z jednego punktu na brzegu rzeki do drugiego, który jest dokładnie naprzeciw. Aby to osiągnąć, nic bezpośrednio przy prędkości 6 km / h, w kierunku prostopadłym, jednak prąd ma prędkość 4 km / h, który go odchyla.
Oblicz wypadkową prędkość pływaka i ile jest odchylany przez prąd.
Wynikowa prędkość pływaka jest sumą wektorów jego prędkości (w odniesieniu do rzeki, rysowanej pionowo w górę) i prędkości rzeki (rysowanej od lewej do prawej), co jest wykonywane zgodnie z poniższym rysunkiem:
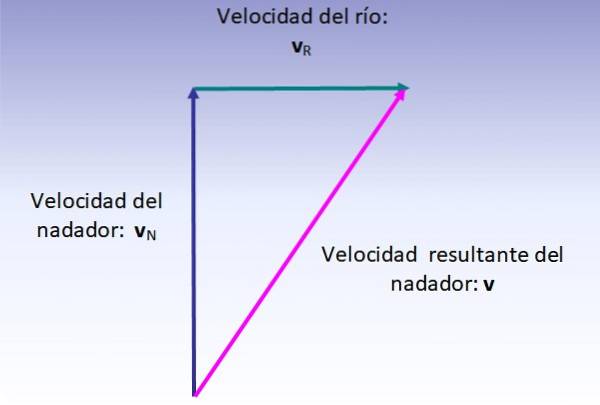
Wielkość uzyskanej prędkości odpowiada przeciwprostokątnej pokazanego trójkąta prostokątnego, dlatego:
v = (6dwa + 4dwa) ½ km / h = 7,2 km / h
Kierunek można obliczyć na podstawie kąta względem prostopadłej do brzegu:
α = arctg (4/6) = 33,7º lub 56,3º względem brzegu.
Znajdź moment pary pokazanej na rysunku:
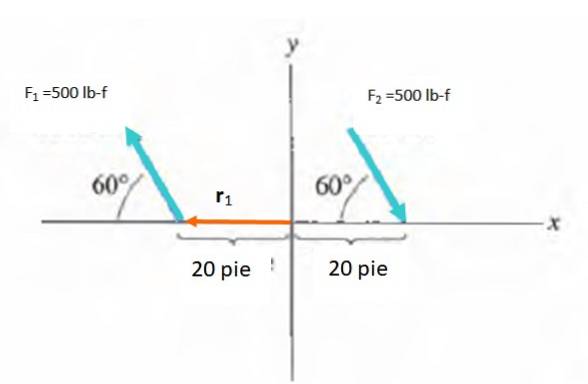
Moment oblicza się według:
M = r x fa
Jednostki w tej chwili to lb-f.ft. Ponieważ moment obrotowy znajduje się w płaszczyźnie ekranu, moment jest skierowany prostopadle do niego, na zewnątrz lub do wewnątrz..
Ponieważ moment obrotowy w przykładzie ma tendencję do obracania przedmiotu, na który jest przyłożony (co nie jest pokazane na rysunku) zgodnie z ruchem wskazówek zegara, moment ten jest brany pod uwagę w kierunku wnętrza ekranu ze znakiem.
Wielkość tego momentu to M = F.d.w a, gdzie a jest kątem między siłą a wektorem r. Musisz wybrać punkt, względem którego chcesz obliczyć moment, który jest wektorem swobodnym. W związku z tym wybrano pochodzenie systemu odniesienia r przechodzi od O do punktu przyłożenia każdej siły.
M1 = Mdwa = -Fdsen60º = -500. 20. Sinus 60º lb-f. ft = -8660,3 lb-f. stopa
Moment netto to suma M1 oraz mdwa: -17329,5 funta-f. stopa.


Jeszcze bez komentarzy