Plik suma wektorów jest operacją dodawania między wektorami, która daje inny wektor. Wektory charakteryzują się wielkością, a także kierunkiem i zwrotem. Dlatego generalnie nie można ich dodawać tak, jak byłoby to zrobione z wielkościami skalarnymi, to znaczy dodając liczby.
Nazywa się wektor otrzymany z sumy kilku wektorów wektor wynikowy. W mechanice mówią o siła wypadkowa, która jest sumą wektorów wszystkich sił działających na ciało. Ta wypadkowa jest równoważna z zestawem lub układem sił.
Aby w pełni określić wektor sumy, konieczne jest wskazanie wielkości i jednostki, kierunku i zwrotu.
Należy zauważyć, że podczas dodawania wektorów muszą one reprezentować tę samą wielkość fizyczną, dlatego suma wektorów jest operacją jednorodną. Oznacza to, że możemy dodać jedną siłę do drugiej, ale nie siłę z przemieszczeniem, ponieważ wynik jest bez znaczenia.
Dostępnych jest kilka metod wyszukiwania wynikowego wektora: graficzna i analityczna. Aby znaleźć sumy wektorów metodami graficznymi, zaczynamy od prostej reprezentacji wektora, a mianowicie zorientowanego segmentu lub strzałki w następujący sposób:

Wektory są oznaczone pogrubionymi literami w drukowanym tekście lub strzałką nad literą, aby odróżnić je od ich odpowiednich wielkości lub wielkości skalarnych. Na przykład wielkość wektora v To jest po prostu v.
Indeks artykułów
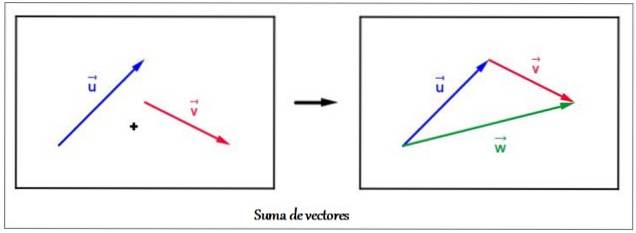
Aby dodać więcej niż dwa wektory współpłaszczyznowe, plik metoda wielokątów lub metoda trawersu, który polega na tłumaczeniu się równolegle do każdego z wektorów addend. Cechą wektorów jest to, że są one niezmienne względem tłumaczenia, dlatego użyjemy tej własności do ustalenia sumy.
Zaczynamy od dowolnego z wektorów, ponieważ dodawanie wektorów jest przemienne, a kolejność dodawania nie zmienia sumy. Drugi wektor jest następnie tłumaczony, dopasowując jego początek do końca pierwszego.
Następnie jest przenoszony do następnego wektora i umieszczany jako następny, zgodnie z tą samą procedurą, która polega na dopasowaniu początku do końca poprzedniego. Postępuj w ten sposób, aż zostanie ustawiony ostatni wektor.
Powstały wektor to ten, który łączy początek pierwszego z wolnym końcem ostatniego. Nazwa tej metody pochodzi od powstałej figury: wielokąt.
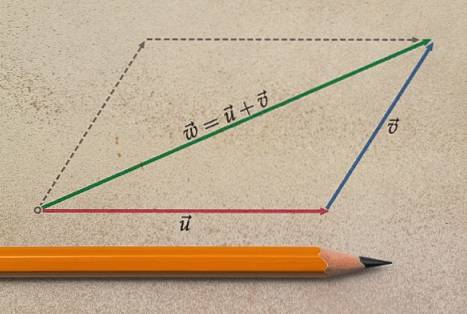
Jako przykład weźmy sumę dwóch wektorów lub Y v pokazano na powyższym rysunku.
Począwszy od wektora lub, przeniesiony do wektora v aby dopasować jego początek do końca pierwszego. Wynikowy wektor w pochodzi z lub do końca v, tworząc trójstronną figurę: trójkąt. Dlatego w tym szczególnym przypadku wywoływana jest procedura metoda trójkąta.
Zwróć uwagę na ważny szczegół, wielkość lub moduł wynikowego wektora nie jest sumą modułów dodanych wektorów. W rzeczywistości jest to prawie zawsze mniej, chyba że wektory są równoległe..
Zobaczmy, co dzieje się w tym przypadku poniżej.
Opisana metoda może być również zastosowana w szczególnym przypadku, w którym wektory są równoległe. Rozważmy następujący przykład:

Pozostawia się wektorowi v w swoim pierwotnym położeniu i jest tłumaczony do wektora lub w taki sposób, aby jego pochodzenie zgadzało się z końcem v. Teraz wektor jest rysowany, zaczynając od początku v i kończy koniec lub.
To jest wektor wypadkowy w a jego wielkość jest sumą rozmiarów dodatków. Kierunek i zwrot trzech wektorów są takie same.
Wynikowy wektor ma maksymalny moduł, jeśli sumy tworzą ze sobą kąt 0º, jak w przykładzie. Jeśli wektory tworzą kąt 180º względem siebie, to otrzymany wektor ma minimalny moduł.
Rowerzysta jedzie najpierw 3 km na północ, a następnie 4 km na zachód. Twoje przemieszczenie, które nazywamy R, można łatwo znaleźć metodą trójkąta plus ramka odniesienia, w której zaznaczono punkty kardynalne:
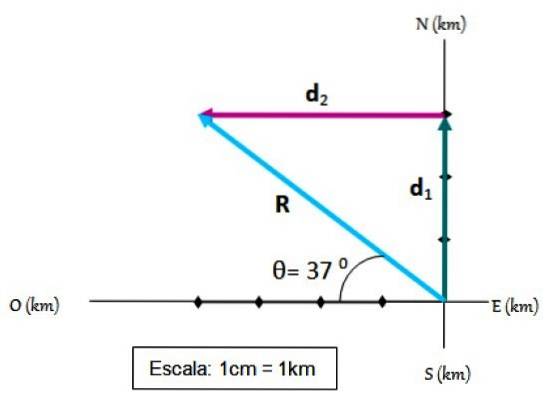
-Punkt wyjścia pokrywa się z początkiem układu odniesienia.
-Na osiach współrzędnych wybierana jest skala, która w tym przypadku wynosi 1 cm = 1 km
-Pierwsze przemieszczenie jest narysowane w skali re1.
-Następnie do re1 rysowany jest drugi odsunięcie redwa, również w skali.
-Wynikające z tego przemieszczenie R jest wektorem, który biegnie od początku do końca redwa.
-Rozmiar R mierzy się linijką z podziałką, łatwo jest sprawdzić, czy R = 5.
-Wreszcie kąt, który R kształt z poziomą mierzy się za pomocą kątomierza i okazuje się, że θ = 37 0
Pływak chce przekroczyć rzekę i za to pływa z prędkością 6 km / h prostopadle do brzegu, ale prąd, który niesie prędkość 4 km / h, odchyla go.
Aby poznać wynikową prędkość, dodaje się wektory prędkości pływaka, które zostały narysowane pionowo, i wektory prądu, które są pokazane poziomo..
Postępując zgodnie z metodą graficzną, uzyskuje się wynikową prędkość vR:
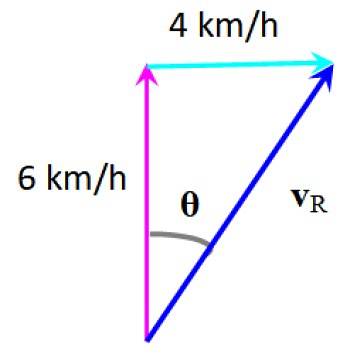
Odchylenie doświadczane przez pływaka można obliczyć za pomocą:
θ = arctg (4/6) = 33,7º na prawo od kierunku początkowego
Wielkość jego prędkości zwiększa się dzięki temu, że prędkość rzeki jest dodawana wektorowo. Można go znaleźć, ostrożnie ustawiając skalę, jak w powyższym przykładzie.
Lub za pomocą stosunków trygonometrycznych 33,7º:
sin 33,7º = 4 / vR
vR = 4 / sin 33,7º = 7,21 km / h
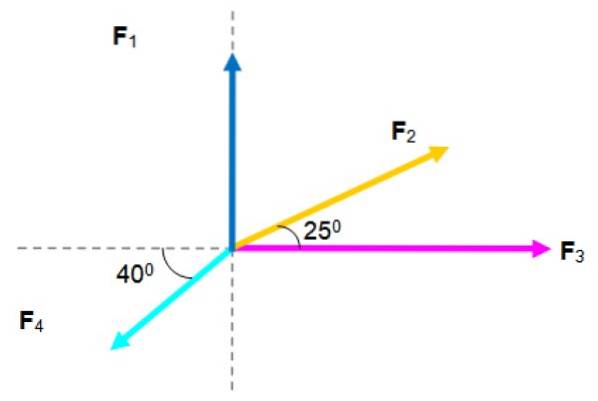
Na cząstkę działają następujące siły, których wielkości są wymienione poniżej:
fa1= 2,5 N; fadwa= 3 N; fa3= 4 N; fa4= 2,5 N.
Znajdź wypadkową siłę.
Możemy dodać graficznie, zaczynając od dowolnego z wektorów, ponieważ suma wektorów jest przemienna.
Na rysunku A zaczęliśmy od fa1. Po ustaleniu skali i za pomocą linijki i kwadratu pozostałe wektory są przenoszone w celu umieszczenia ich jeden po drugim..
Wektor faR jest skierowany od pochodzenia fa1 do końca fa4. Jego wielkość wynosi 5,2 N i tworzy kąt 26,5º względem poziomu.
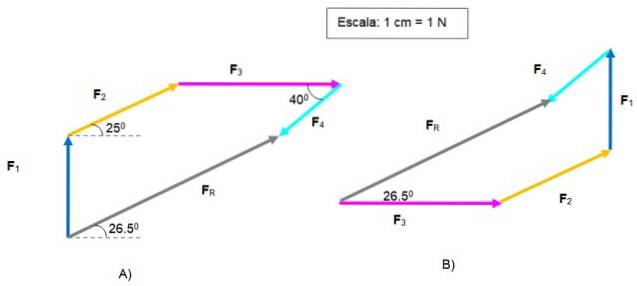
Na rysunku B ten sam problem został rozwiązany, zaczynając od fa3 i kończąc na fa4, być równym faR .
Wielokąty są różne, ale wynik jest taki sam. Czytelnik może wykonać test, ponownie zmieniając kolejność wektorów.

Jeszcze bez komentarzy