Plik wektor wynikowy jest tym otrzymanym za pomocą operacji na wektorach, której wynikiem jest również wektor. Zwykle operacja ta jest sumą dwóch lub więcej wektorów, za pomocą których uzyskuje się wektor o równoważnym skutku.
W ten sposób uzyskuje się wektory, takie jak wynikowa prędkość, przyspieszenie lub siła. Na przykład, gdy na ciało działa kilka sił fa1, fadwa, fa3,… suma wektorów wszystkich tych sił jest równoważna sile wypadkowej (wypadkowej), która jest matematycznie wyrażona w następujący sposób:
fa1 + fadwa + fa3 +… = faR lub faN

Wynikowy wektor, niezależnie od tego, czy są to siły, czy jakakolwiek inna wielkość wektora, znajduje się stosując zasady dodawania wektorów. Ponieważ wektory oprócz wartości liczbowej mają również kierunek i zwrot, nie wystarczy dodać modułów, aby uzyskać wektor wynikowy.
Dzieje się tak tylko w przypadku, gdy zaangażowane wektory są w tym samym kierunku (patrz przykłady). W przeciwnym razie konieczne jest zastosowanie metod sum wektorowych, które w zależności od przypadku mogą być geometryczne lub analityczne..
Indeks artykułów
Geometryczne metody znajdowania wynikowego wektora to metoda wielokątów i metoda równoległoboku.
Jeśli chodzi o metody analityczne, istnieje metoda składowa, za pomocą której można znaleźć wektor wynikający z dowolnego układu wektorów, pod warunkiem, że mamy jego składowe kartezjańskie..
Załóżmy, że wektory lub Y v (Oznaczamy je pogrubioną czcionką, aby odróżnić je od skalarów). Na rysunku 2a) mamy je umieszczone w samolocie. Na rysunku 2 b) został przeniesiony do wektora v w taki sposób, że jego początek pokrywa się z końcem lub. Wynikowy wektor pochodzi od początku pierwszego (lub) do końca ostatniego (v):
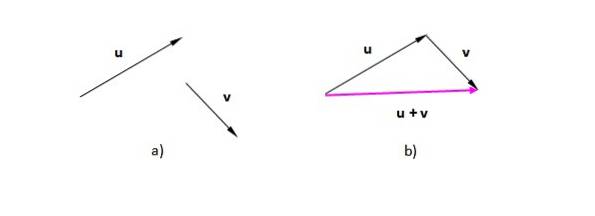
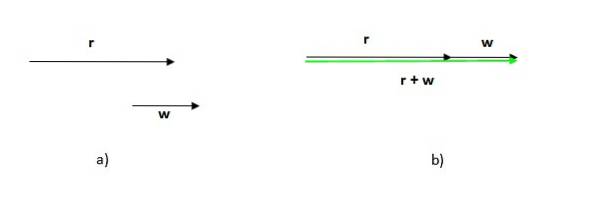
Wynikowa figura w tym przypadku to trójkąt (trójkąt to trójstronny wielokąt). Jeśli mamy dwa wektory w tym samym kierunku, procedura jest taka sama: umieść jeden z wektorów po drugim i narysuj ten, który biegnie od początku lub końca pierwszego do końca lub końca ostatniego.
Zauważ, że kolejność wykonywania tej procedury nie ma znaczenia, ponieważ suma wektorów jest przemienna.
Zwróć również uwagę, że w tym przypadku moduł (długość lub rozmiar) wynikowego wektora jest sumą modułów dodanych wektorów, w przeciwieństwie do poprzedniego przypadku, w którym moduł wynikowego wektora jest mniejszy niż suma modułów uczestników.
Ta metoda jest bardzo odpowiednia, gdy trzeba dodać dwa wektory, których punkty początkowe pokrywają się, powiedzmy, z początkiem układu współrzędnych x-y. Załóżmy, że tak jest w przypadku naszych wektorów lub Y v (rysunek 3a):
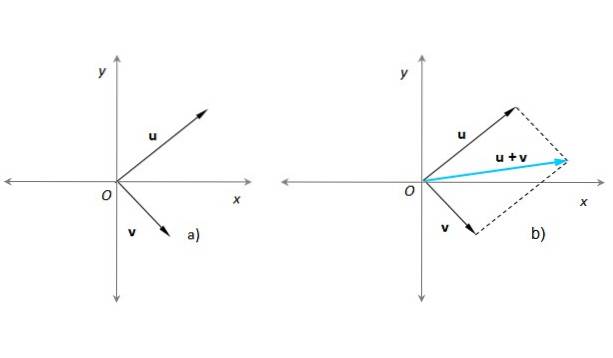
Na rysunku 3b) równoległobok został skonstruowany za pomocą przerywanych linii równoległych do lub już v. Wynikowy wektor ma swój początek w O, a koniec w punkcie, w którym przecinają się kropkowane linie. Ta procedura jest całkowicie równoważna z procedurą opisaną w poprzedniej sekcji..
Biorąc pod uwagę następujące wektory, znajdź wynikowy wektor za pomocą metody trawersu.
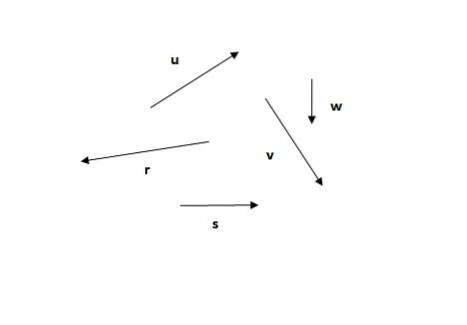
Metoda poligonowa jest pierwszą z widocznych metod. Pamiętaj, że suma wektorów jest przemienna (kolejność addendów nie zmienia sumy), więc możesz zacząć od dowolnego z wektorów, na przykład lub (rysunek 5a) lub r (rysunek 5b):
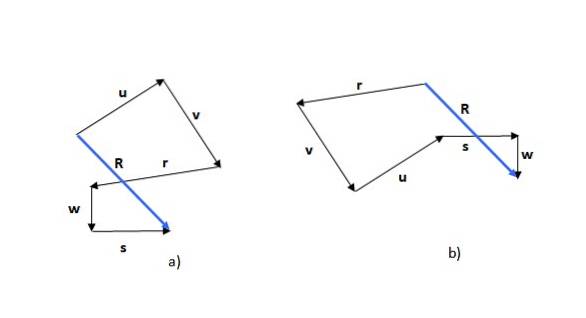
Uzyskana figura jest wielokątem, a wynikowy wektor (w kolorze niebieskim) jest nazywany R. Jeśli zaczniesz od innego wektora, utworzony kształt może być inny, jak widać na przykładzie, ale wynikowy wektor jest taki sam.
Na poniższym rysunku wiadomo, że moduły wektorów lub Y v odpowiednio są to u = 3 dowolne jednostki i v = 1,8 dowolne jednostki. Kąt, który lub kształt z dodatnią osią x wynosi 45º, podczas gdy v tworzy 60º z osią y, jak widać na rysunku. Znajdź wynikowy wektor, wielkość i kierunek.
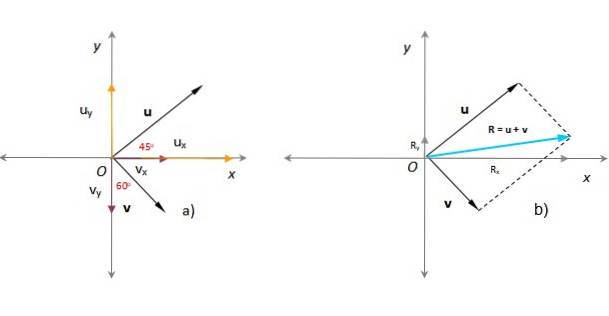
W poprzedniej sekcji otrzymany wektor został znaleziony metodą równoległoboku (na rysunku w kolorze turkusowym).
Łatwym sposobem analitycznego znalezienia wektorów wynikowych jest wyrażenie wektorów addend w kategoriach ich składowych kartezjańskich, co jest łatwe, gdy znany jest moduł i kąt, tak jak wektory w tym przykładzie:
lubx = u. cos 45º = 3 x cos 45º = 2,12; lubY = u. sin 45º = 3x sin 45º = 2,12
vx = w. sin 60º = 1,8 x sin 60º = 1,56; vY = -v. cos 60º = -1,8 x cos 60º = - 0,9
Wektory lub Y v są wektorami należącymi do płaszczyzny, a zatem mają po dwie składowe. Wektor u znajduje się w pierwszej ćwiartce i jego składowe są dodatnie, podczas gdy wektor v jest w czwartej ćwiartce; jego składowa x jest dodatnia, ale jego rzut na oś pionową opada na ujemną oś y.
Wynikowy wektor znajduje się, dodając algebraicznie odpowiednie składowe xiy, aby otrzymać ich składowe kartezjańskie:
Rx = 2,12 + 1,56 = 3,68
RY = 2,12 + (-0,9) = 1,22
Po określeniu komponentów kartezjańskich wektor jest w pełni znany. Wynikowy wektor można wyrazić za pomocą notacji w nawiasach kwadratowych (szelki):
R = < 3.68; 1.22> jednostki arbitralne
Notacja z nawiasami kwadratowymi służy do odróżnienia wektora od punktu na płaszczyźnie (lub w przestrzeni). Innym sposobem analitycznego wyrażenia otrzymanego wektora jest użycie wektorów jednostkowych ja i j w samolocie (ja, jot Y k w kosmosie):
R = 3,68 ja + 1.22 jot jednostki arbitralne
Ponieważ oba składniki otrzymanego wektora są dodatnie, wektor R należy do pierwszego kwadrantu, który był już wcześniej widziany graficznie.
Znając składowe kartezjańskie, wielkość R jest obliczana za pomocą twierdzenia Pitagorasa, ponieważ wynikowy wektor R, wraz z jego komponentami R.x i R.Y uformuj trójkąt prostokątny:
Wielkość lub moduł: R = (3,68dwa + 1.22dwa)½ = 3,88
Kierunek q przyjmujący dodatnią oś x jako odniesienie: q = arctan (RY / Rx) = arctg (1,22 / 3,68) = 18,3 º



Jeszcze bez komentarzy